
Orin开发套件04-安装DeepStream
前面安装Jetson Orin开发套件的开发环境过程,并没有将DeepStream智能分析套件安装进去,因此需要独立的安装过程,这里提供三种安装方式给使用者参考。
- 使用DeepStream压缩包进行安装:
请访问https://developer.nvidia.com/deepstream-getting-started ,进入后会看到如下图的DeepStream SDK 6.1版本说明:
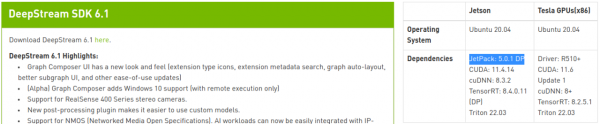
右表所列的是对于系统的要求,在Jetson的部分必须是JetPack 5.0.1 DP版本以上,Jetson Orin开发套件刚好符合这个要求,因此可以安装这个6.1版本的DeepStream。
页面往下会看到如下图的“Downloads”部分:

点选左下角“I Agree To…”左边的框,就会跳出下图的选项:
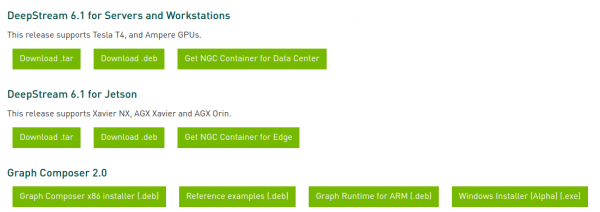
这里推荐下载“Download .tar”压缩包的方式会比较简单。点击后会弹出下面画面:

这是要求使用者必须拥有NVIDIA开发者社区账号,如果没有的话就申请一个,至于申请与登录的步骤,这里就不多赘述了。
将压缩包下载至Jetson Orin开发套件之后,请在Jetson Orin上执行以下步骤:
|
$
$ |
# 安装依赖库 sudo apt install -y libssl1.0.0 libgstreamer1.0-0 gstreamer1.0-tools gstreamer1.0-plugins-good gstreamer1.0-plugins-bad gstreamer1.0-plugins-ugly gstreamer1.0-libav libgstrtspserver-1.0-0 libjansson4=2.11-1 libgstreamer-plugins-base1.0-dev libgstreamer1.0-dev libgstrtspserver-1.0-dev libx11-dev # 重新安装nvidia-l4t的相关库 sudo apt install --reinstall -y nvidia-l4t-gstreamer nvidia-l4t-multimedia nvidia-l4t-core |
现在请到前面下载的deepstream_sdk_v6.1.0_jetson.tbz2的位置,执行以下指令开始安装DeepStream开发工具:
|
$ $ $ |
sudo tar -xvf deepstream_sdk_v6.1.0_jetson.tbz2 -C / cd /opt/nvidia/deepstream/deepstream sudo ./install.sh && sudo ldconfig |
接下来执行下面指令,检验DeepStream的安装是否成功:
|
$ |
deepstream-app --version-all |
第一次执行会出现一些警告(warning)信息,再执行一次就会正常出现下图信息:
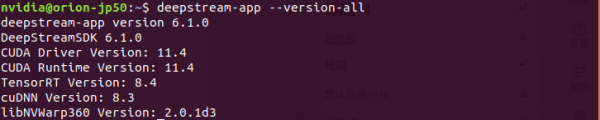
这样就表示安装完成了。
- 通过SDK Manager安装:
这种安装需要有一台装有Ubuntu或CentOS的x86电脑来辅助,相对繁琐一些。这个工具可以在https://developer.nvidia.com/nvidia-sdk-manager下载,直接使用dpkg进行安装就可以,然后开启SDK Manager进行安装。
这种方式比较麻烦的部分是SDK Mananger的登录步骤(如下图),与前一种方式同样需要有NVIDIA开发者社区的账号与密码,如果没有也得申请一个。但是后台验证步骤需要连上NVIDIA的服务器,因此有时需要重复多次才能成功。

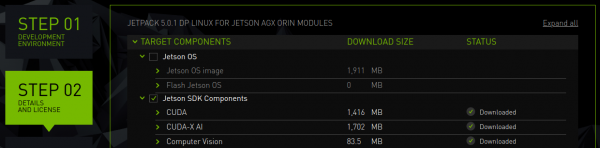
登录成功之后进入“STEP 1”选择安装的内容,请勾选下图最下方“DeepStream”选项,然后点选“CONTINUE”进入下一步。
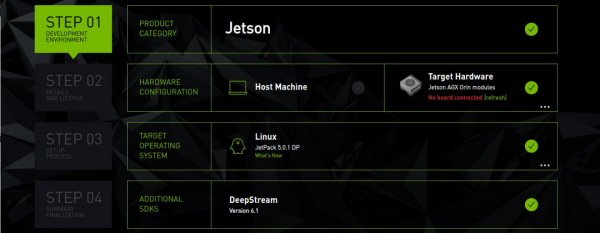
在“STEP 2”里最重要的,就是“取消Jetson OS”选项,如下图所示,因为我们只需要安装DeepStream,而不需要安装操作系统。
选择好之后,勾选最下方“I accept the terms…”选项,就能进入下个步骤。系统弹出下图对话框,这里有两种连线的选择方式:
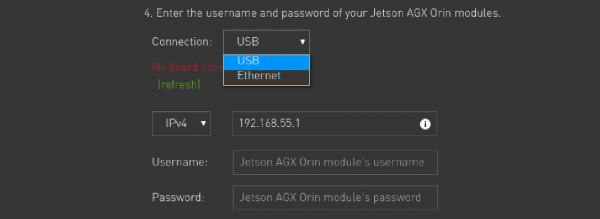
- USB:这是Jetson的headless模式进行连接,用Jetson Orin开发套件所提供的Type-C USB传输线将Jetson Orin与PC形成连线;
- Ethernet:使用标准的局域网形成连线,在Jetson Orin可以使用有线或无线的方式。
选择好之后,如果是USB方式则下面的IP预设为192.168.55.1,如果是Ethernet的话则需要自行查清楚Jetson Orin的IP地址。然后输入Jetson Orin的Username与Password,再点击下方“Install”按钮,就能执行DeepStream的安装。
- 使用Docker容器版本:
这是当下最热门的应用与部署技术,从JetPack 4.0版之后,都为Jetson设备安装好Docker基础环境,我们可以直接使用。
DeepStream从5.1开始提供Docker版的使用环境,只需要从NGC下载镜像后就能在Jetson设备上启动使用,不过使用过程需要先熟悉Docker的指令与设备对应关系,这里先教大家在Jetson Orin开发套件上安装Docker版的DeepStream套件。
登录https://catalog.ngc.nvidia.com/orgs/nvidia/containers/deepstream-l4t 会进到下图页面中,点击右上角“Pull Tag”下拉选项就会显示目前所支持的各种版本。
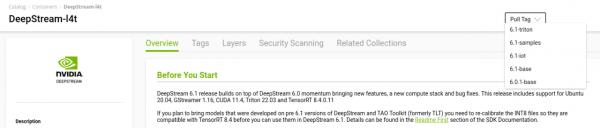
Jetson Orin开发套件支持的Jetpack 5.x版本,目前只支持DeepStream 6.1,因此我们需要点击选择下数第二个“6.1-base”,系统已经将下载指令“docker pull nvcr.io/nvidia/deepstream-l4t:6.1-base”复制到剪贴板里面,我们只要在命令行视窗上使用Ctrl-Shift-V组合键,就能完整粘贴的指令:
|
$ |
docker pull nvcr.io/nvidia/deepstream-l4t:6.1-base |
这样就能从NGC下载deepstream-l4t:6.1-base镜像到Jetson Orin开发套件上。至于使用的方式,主要启动指令如下:
|
$
$ |
# 允许外部应用程序连接到主机的X显示器: xhost + # 允许外部应用程序连接到主机的X显示器: sudo docker run -it --rm --net=host --runtime nvidia -e DISPLAY=$DISPLAY \ -w /opt/nvidia/deepstream/deepstream-6.1 -v /tmp/.X11-unix/:/tmp/.X11-unix \ nvcr.io/nvidia/deepstream-l4t:6.1-base |
如果要添加摄像头的话,需要在这个指令里添加以下内容:
- 添加CSI摄像头:-v /tmp/argus_socket:/tmp/argus_socket
- 添加USB摄像头:--device /dev/video<N>
这样就可以开始使用DeepStream 6.1来进行测试与开发了。
来源:业界供稿
好文章,需要你的鼓励


AI对就业的影响:大规模裁员背后的真相与数据
近期数据显示,2026年5月前企业已宣布约9万个与AI相关的裁员岗位,部分预测称未来五年美国15%的工作将被AI取代。然而,Ramp与Revelio Labs追踪近2.2万家企业的最新报告显示:重度投入AI的企业反而实现了更快的人员增长,包括初级岗位在内的各职能人数均有上升。但这一数据主要来自技术型企业,能否普遍适用仍存疑。报告同时指出,资源匮乏的企业可能在AI浪潮中持续落后。

阿里巴巴让AI图像生成模型“自我进化“:Qwen-Image-2.0-RL是如何让机器学会审美的?
阿里Qwen团队通过引入强化学习和在线策略蒸馏,将Qwen-Image-2.0升级为Qwen-Image-2.0-RL,让图像生成模型真正学会人类审美,文生图Elo评分提升78分,图像编辑提升93分。

AI重复申请问题推动电网转向“承诺优先“规划
AI数据中心开发商向多家电力公司同时提交大负荷接入申请以确定选址,导致区域需求预测虚高、电网投资失衡。美国联邦能源监管委员会(FERC)及ERCOT、PJM、SPP等机构正推动"承诺优先"规划机制,要求项目具备实质性商业承诺方可纳入长期传输规划。谷歌、亚马逊、微软、OpenAI等科技巨头支持建立标准化的项目成熟度评估体系,但各方在具体机制上仍存分歧。发电建设问题尚未被纳入联邦传输改革议程。

港科大联手快手,让AI画图“减减肥“:一个让图像生成更真实的小技巧
港科大与快手联合提出NormGuard,针对流匹配模型强化学习训练中速度范数膨胀问题,通过训练时单向惩罚约束,在保留奖励的同时改善图像真实感。
2022
07/21
14:29
分享
点赞

OKX推出AI智能体招聘与支付市场平台
AI编程Token成本将与开发者薪资持平,企业如何应对?
机器学习项目全生命周期管理的成功实践
SVT Robotics的Softbot平台交易量突破40亿笔
杜尔为大众汽车建设跨工厂集成CO?高效涂装车间
AI对就业的影响:大规模裁员背后的真相与数据
AI重复申请问题推动电网转向"承诺优先"规划
美国消费品安全委员会拟出台电动自行车电池安全新规
江波龙:建设完成mSSD月产能百万交付能力!mSSD高速存储介质赋能端侧AI规模应用
从IO500双榜第一,看国产存储的系统级突破
8090 Solutions完成1.35亿美元融资,加速AI软件开发自动化布局
Rocket Lab宣布以80亿美元收购卫星运营商铱星公司
