
Jetbot系列12-图像分类法实现找路功能
避撞功能是智能车的最基本保护能力,Jetbot使用深度学习的图像分类技术来模拟人眼习惯实现这个功能,但这只是智能车所展现的最入门应用而已,接下去就要提升到“循路”的功能,跟着指定路线去前进,才是真正进入有实用价值的应用。
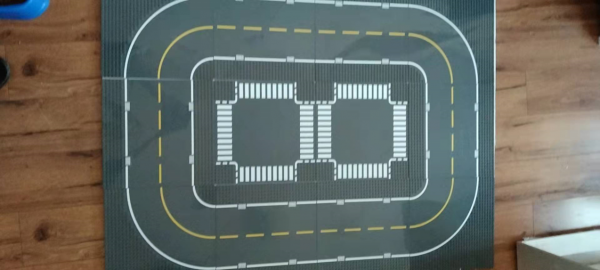
在https://developer.nvidia.com/embedded/community/jetson-projects里有非常多精选的项目,其中的“TRANSFER LEARNING WITH JETBOT & TRAFFIC CONES”项目就是前面避撞应用的延伸,模拟无人驾驶车在道路上识别路锥所规划出的道路(如下图),然后驱动机电控制系统执行智能驾驶的功能。

有能力的读者可以访问https://www.youtube.com/watch?v=YwxSwXEjd4c,观看整个项目的构思逻辑,事实上这个项目使用的与避撞项目相同的深度学习图像分类技术来进行路锥的识别,在”blocked”与”free”与两个分类之上再添加“left”与“right”两个分类,其他的执行逻辑与避撞项目几乎完全一样。

请访问https://github.com/dvillevald/Finding-path-in-maze-of-traffic-cones,在traffic_cones_driving目录下有三个脚本,分别执行数据收集、模型训练与现场演示三部分,与避撞应用的节奏是一样的,最关键的环节也是在“数据收集(data_collection)”部分,至于模型训练(train_model)的部分则添加迁移学习的功能,而现场演示(live_demo)的部分则增加比较细腻的判断,并且提供运行过程的记录功能,便于后面进行矫正的任务。
现在根据三个步骤所需要注意的重点,提供一些参考的说明,至于执行代码的细节直接对照避撞项目的脚本就可以。
- 数据收集:使用data_collection_cones.ipynb
这个环境同样是整个应用中最关键与最繁琐的步骤,与避撞项目相同的,我们必须使用Jetbot上面的CSI摄像头进行数据采集,并且同时进行分类,主要有以下三件需要注意的事项:
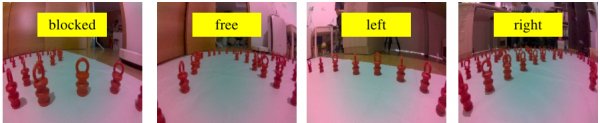
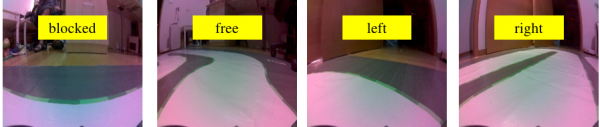
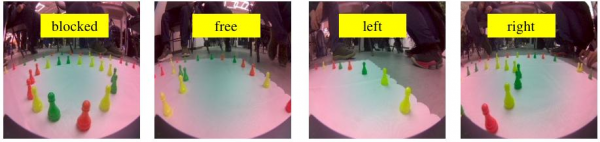
- 虽然原创团队使用“小红锥(如上图)”作为“分道物体”去部署行进的路线,但其实也可以使用任何物体来进行体验,包括“跳棋子”、“围棋子”或用“非透明”的定位胶带(如下图),只要颜色与地面(板)有明显反差的就行,例如浅色地板就用深色物体或胶带、深色地板就用浅色物体或胶带。

或者在下图这种印好赛道的板子或者塑料布上也可以,重点并不在于是否为“立体物”,而是能在图像中识别出的“明显边界”,这样就能用来执行这个数据收集的任务。
- 执行图像收集的时候,并不需要将分道物体按照指定路线进行排列,只需要排成半个圆形或方形就可以。这里需要识别的“边界状况”是固定的立体物或线条,比前面避撞项目所需要面对众多“未知物”更加简单,因此4个分类大约各收集20~30张图片也就够了。
- 采集数据的分类,请根据“摄像头所看到的画面”去进行分类,避免从人眼去判断目前镜头图像“可能”是哪个类别,这样才不会造成误差而影响最终的识别效果。下面列出几种分道物所采集分类的图像,提供作参考。
- 模型训练:使用train_model_cones.ipynb
这个项目名称里虽然有“Transfer Learning”在里面,不过只是在“Define the neural network”第一个步骤的“model = models.alexnet(pretrained=True)”用到PyTorch预训练好的AlexNet 1000类的分类器模型,但是这些分类与我们所使用的分道物基本没有关联,因此以这个使用这个模型为基础的迁移学习并没有明显的帮助。
如果想将前面的避撞功能加到这个循路应用里,有两种方法可以实现:
- 将避撞项目收集好的 ”blocked” 与 ”free” 类别图像数据,分别加到这个项目的对应目录中一起进行模型训练。
- 运用“迁移学习”技巧,在执行模型训练之前将避障项目的best_model.pth导进来作为训练的基础,当然您得先把避撞的best_model.pth模型文件复制到这个目录下。不过这个做法需要在代码上做些小幅度的修改,将“Define the neural network”第一个步骤进行以下的调整:
|
[ ] |
# 关闭原本的pretrained设置 model = models.alexnet(pretrained=False) # 添加下面代码 model.load_state_dict(torch.load('best_model.pth')) |
这种做法的好处是,未来面向更多不同分道物的时候,可以不断往上叠加以增加Jetbot适合的使用场景。
例如第一次使用红锥做分道物,进行数据采集并训练出best_model_cones_1.pth,等后面用要使用定位胶带做分道物的时候,就能在best_model_cones_1.pth的基础上去训练能识别红锥与定位胶带两种分道物的best_model_cones_2.pth模型,真正发挥迁移学习的效果。
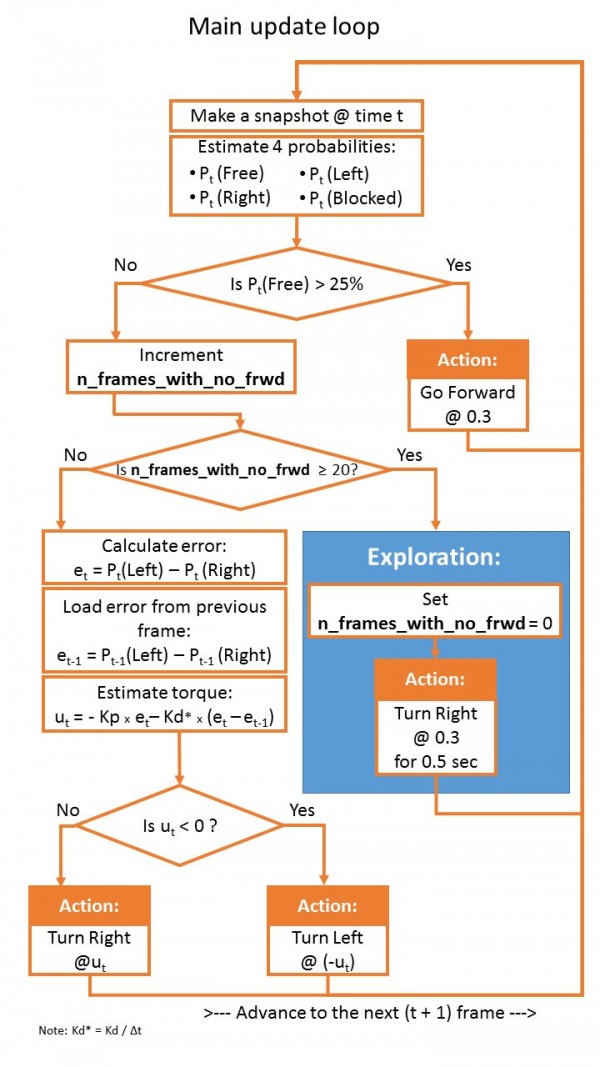
- 现场演示:使用live_demo_cones.ipynb
这个脚本与避撞的live_demo基本逻辑是一样的,项目提供一个完整的决策流程图(如下)可以参考一下。
另外这里面还添加一个“第一视角(FPV, Fisrt Person View)”的视频记录功能,将循路的行进过程完整记录下来,呈现的方式如下图:

这个功能在校正过程是非常有用的,但是视频存储的工作会占用Jetbot不少的CPU计算资源与以及非常紧凑的存储空间,因此完成校正之后就建议将这个功能关闭,这个功能的函数名是 ”save_frames_with_telemetry” ,请使用网页搜索功能在脚本里找到位置,只要在前面加上 ”#” 关闭调用就可以。
剩下的工作就是按部就班去执行,有了这个循路的功能之后,才是让Jetbot真正进入智能车应用的起点。【完】
来源:业界供稿
好文章,需要你的鼓励


星际之门AI数据中心建设雄心遭遇现实挑战
2025年1月,OpenAI、软银、甲骨文和MGX联合宣布"星际之门"计划,承诺投资5000亿美元,部署高达10GW算力基础设施。如今,该项目已从白宫发布会上的宏大承诺,演变为一场前所未有规模的基础设施建设实验。项目已扩展至德克萨斯、威斯康星、俄亥俄等多地,并延伸至阿布扎比和挪威。然而,融资争议、合作伙伴摩擦、能源压力及政策监管收紧,正考验着这一"AI工业园"模式能否真正落地。

阿里巴巴让AI图像生成模型“自我进化“:Qwen-Image-2.0-RL是如何让机器学会审美的?
阿里Qwen团队通过引入强化学习和在线策略蒸馏,将Qwen-Image-2.0升级为Qwen-Image-2.0-RL,让图像生成模型真正学会人类审美,文生图Elo评分提升78分,图像编辑提升93分。

OKX推出AI智能体招聘与支付市场平台
加密货币交易所OKX正式推出AI智能体交易市场OKX AI,允许AI代理相互雇佣、自主结算,并建立基于区块链的可携带信誉档案。该平台经过50家早期服务商封测后向开发者开放,依托稳定币和链上支付基础设施,支持全天候微支付。OKX创始人徐明星表示,传统金融基础设施为人类而建,智能体经济需要为自主软件专门设计的基础设施。

港科大联手快手,让AI画图“减减肥“:一个让图像生成更真实的小技巧
港科大与快手联合提出NormGuard,针对流匹配模型强化学习训练中速度范数膨胀问题,通过训练时单向惩罚约束,在保留奖励的同时改善图像真实感。
2022
02/15
14:15
分享
点赞

星际之门AI数据中心建设雄心遭遇现实挑战
OKX推出AI智能体招聘与支付市场平台
AI编程Token成本将与开发者薪资持平,企业如何应对?
机器学习项目全生命周期管理的成功实践
SVT Robotics的Softbot平台交易量突破40亿笔
Agibot第15000台人形机器人下线,具身AI量产加速
杜尔为大众汽车建设跨工厂集成CO?高效涂装车间
AI对就业的影响:大规模裁员背后的真相与数据
AI重复申请问题推动电网转向"承诺优先"规划
美国消费品安全委员会拟出台电动自行车电池安全新规
江波龙:建设完成mSSD月产能百万交付能力!mSSD高速存储介质赋能端侧AI规模应用
从IO500双榜第一,看国产存储的系统级突破
