
Jetbot实战系列06:I2C总线与PiOLED
在“Jetbot实战系列05-Jetson的40针引脚”一文,已经将SFIO与GPIO之间的关系分析清楚,接下来就是带着大家更深入了解I2C引脚与开发库的使用,以及调整PiOLED显示内容的方法,这两个部分都是Jetbot智能小车项目非常关键的一环,但我们更希望读者能将执行技术使用在更广泛的场景中。
- I2C总线的特性
前面提到过,在Jetson的40根引脚中有18根SFIO类的引脚与电路板直连的,这是不能改变功能的引脚,其中就有两组I2C的[3, 5]与[27,28]引脚,是不需要透过Jetson-IO指定就能使用的。
全名为“集成电路总线(Inter-Integrated Circuit)”的I2C是由飞利浦公司在1980年代初所设计的,是一种“多主从(master/slave)架构的串行通信总线”,由于结构设计得非常简单并且有很大的弹性空间,使得这个总线的普及度相当高,广泛用于微控制器与传感器阵列,显示器,IoT设备,EEPROM等之间的通信。
这里并不讲解I2C的工作原理与电子电路图,这些太过底层的知识对于应用工程师来说意义并不大,就算不懂也不会影响代码的操作。不过I2C总线的特性,倒是需要了解一下,这对于应用开发是有帮助的。以下简单列出I2C总线的一些特性:
- 只需要SDA数据线和SCL时钟线就能完成所有工作,总线界面已经集成在芯片内部,不需要特殊的界面电路;
- 是一个真正的多主机总线:
- 如果两个或多个主机同时初始化数据传输,可以通过冲突检测和仲裁防止数据破坏,每个连接到总线上的器件都有唯一的地址,任何器件既可以作为主机也可以作为从机,但同一时刻只允许有一个主机。
- 数据传输和地址设定由软件设定,非常灵活。总线上的器件增加和删除不影响其他器件正常工作。
- 最大主(master)设备数量:无限制;最大从(slave)机数量:127
- 可以通过外部连线进行在线检测,便于系统故障诊断和调试,故障可以立即被寻址,软件也利于标准化和模块化,缩短开发时间。
- 连接到相同总线上的IC数量只受总线最大电容的限制,串行的8位双向数据传输位速率在标准模式下可达每秒100Kbit、快速模式下可达每秒400Kbit、高速模式下可达每秒3.4Mbit、超高速模式下可达每秒5Mbit性能。
- 总线具有极低的电流消耗、抗高噪声干扰,增加总线驱动器可以使总线电容扩大10倍,传输距离达到15米,兼容不同电压等级的器件与工作温度范围宽。
看完以上这些特性之后,就能很清楚地了解为何I2C总线协议会受到广泛的青睐,不仅扩充性强而且稳定性高,并且成本还比较低,接下去就来看看如何使用代码来透过这个总线去控制周边设备。
- I2C总线的检测工具- i2c-tools
首先要捋清楚I2C的归类是SFIO而不是GPIO类型,不能使用前一篇文章最后所提到的Jetson.GPIO库进行开发。
I2C有自己专属的i2c-tools检测工具,可以用指令检测设备上I2C的状态,并使用SMBUS总线开发库来进行开发,Jetbot系统的机电操控指令也是基于这个库进行高阶封装的。虽然在Jetbot系统里已经将这些工具与库都安装调试好,不过这里还是提供这个工具与开发库的安装与调试步骤,这样就能在其他Jetson系列设备上调用。
安装i2c-tools与smbus库的步骤很简单,请执行以下指令
|
$ |
sudo apt update && sudo apt install -y i2c-tools |
不过这些牵涉到底层的调用,因此需要配置使用的权限,如下步骤:
|
$ |
sudo usermod -aG i2c $USER |
现在就可以执行以下指令,检查看看设备里有几个i2c总线:
|
$ |
i2cdetect -l |
从下图可以看到在Jetson Nano 2GB里有7组I2C总线。
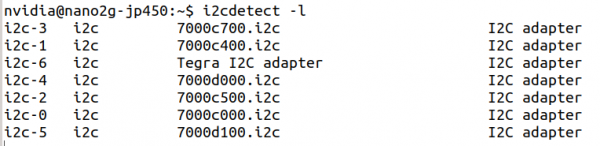
如果您手边还有Jetson Nano、AGX Xavier或Xavier NX开发套件,可以执行这个指令看看不同设备的I2C总线数量,可以发现Jetson Nano与AGX Xavier各有9组,而Xavier NX有11组。
不过不管芯片提供有多少组总线,目前在40针引脚上只用到两组,那到底用到那两组?请使用前一篇文章里面提到的 “sudo /opt/nvidia/jetson-io/jetson-io.py” 这个工具,进去就能看到现在使用I2C总线编号,其他可能用在与一些内部设备相连接的总线,在这里就不做探索。
接下来就可以检查个别总线上所连接的设备,例如将Jetbot用到的PiOLED显示屏,按照要求连接在Jetson Nano 2GB的第3引脚与第5引脚上,对照40针引脚说明,可以知道这两根引脚属于I2C_2这一组总线,于是要检查这组所接设备时,需要执行以下指令:
|
$ |
i2cdetect -y -r 1 |
注意,这个指令最後面所选的编号是从”0”开始,因此对应到I2C总线编号时,需要经过“减1”的处理。执行之后会看到如下图的结果,有个16进制编号为“0x3c”的设备正连接在I2C_2总线上面。

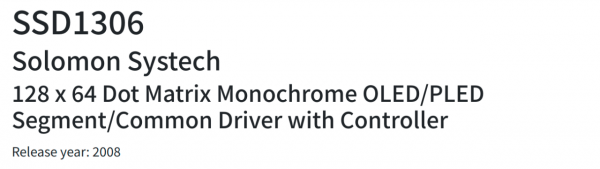
网上大部分的说明就是告诉我们“找到设备”了,但我们如何识别这个设备是什么?却没有人说个明白。经过几番搜索之后,才在 https://i2cdevices.org/addresses 里面找到这些编号的对应设备,例如”0x3c”的设备总共有6种(如下图),每一种都有可能。

经过一一查看之后,发现这6个全部都属于“显示类”的设备,而SSD1306的规格符合我们连接的PiOLED显示器规格,如下图:
这一番摸索之后,大概就能明确如何透过指令来确认所连接的设备,大家只要依循这样的逻辑与资源,就能非常容易地捋顺这个I2C总线的使用。现在已经能使用i2c-tools工具来检测I2C总线所连接的设备,接着就来看看在代码层面该如何对I2C设备执行控制!
- PiOLED显示板
这是创客树莓派极为常用的显示设备,在网上可以找到以下三种:
- Adafruit原版(下图最左边):约150人民币
- 国产树莓派PiOLED屏(下图中间):约30人民币
- 0.91寸OLED显示屏(下图右边):约10人民币

其实三种的关键元件都一样,就是右边那个最便宜的”0.91寸OLED显示屏”,左边两个只是再添加一个很简单很便宜的电路转接板,然后再加以焊接加工而已。如果您打算按照Jetbot提供的自行组装方式,包括3D打印车体、单独采购PCA9685+TB6612控制板,那么“自行焊接加工”的步骤是跳不过去的。
对初学者来说,推荐使用中间的“树莓派PiOLED屏”会比较方便,现在以这个为例子,按照前面的下图接到Jetson Nano 2GB上,就能在前面的 ”i2cdetect -y -r 1”指令下看到 ”0x3c” 设备。

如果你在Jetbot系统上,并且正常开机的状况下,应该就能看到显示器上出现如下图的信息,这个信息是由 ~/jetbot/jetbot/apps/stats.py 所控制,现在就来看一下这只代码的内容,下面将一些比较关键的代码列出来说明:
|
23 28 33 60
80 81 82 83 84 85
89 90 91 92
95 96 97 |
import Adafruit_SSD1306 from jetbot.utils.utils import get_ip_address disp = Adafruit_SSD1306.SSD1306_128_32(rst=None, i2c_bus=1, gpio=1) draw.rectangle((0,0,width,height), outline=0, fill=0) # 将屏涂黑 # 下面代码负责收集CPU、内存、硬盘等计算资源使用的动态信息: cmd = "top -bn1 | grep load | awk '{printf \"CPU Load: %.2f\", $(NF-2)}'" CPU = subprocess.check_output(cmd, shell = True ) cmd = "free -m | awk 'NR==2{printf \"MEM: %s/%sMB %.2f%%\", ,,*100/ }'" MemUsage = subprocess.check_output(cmd, shell = True ) cmd = "df -h | awk '$NF==\"/\"{printf \"DISK: %d/%dGB %s\", ,,}'" Disk = subprocess.check_output(cmd, shell = True ) # 下面将要显示到OLED屏的信息进行整理,不过最多只能显示4行 draw.text((x, top), "eth0: " + str(get_ip_address('eth0')), font=font, fill=255) draw.text((x, top+8), "wlan0: " + str(get_ip_address('wlan0')), font=font, fill=255) draw.text((x, top+16), str(MemUsage.decode('utf-8')), font=font, fill=255) draw.text((x, top+25), str(Disk.decode('utf-8')), font=font, fill=255)
disp.image(image) disp.display() time.sleep(1) |
以下是正OLED屏的调用细节:
- 这个屏的尺寸是128x32像素,与SSD1306规格相同,因此直接使用Adafruit所提供的 Adafruit_SSD1306 库
- 接下来用 Adafruit_SSD1306.SSD1306_128_32创建disp对象,里面的参数
- rst是Raspberry Pi pin configuration的引脚定义,在这里并不使用(none);
- i2c_bus指定所使用的总线编号,前面说过这里使用的是第二组(i2c_2),但在代码里的编号是”1”,如果用的是第一组则编号为”0”;
- gpio表示这个脚位是否被占用?设置为”1”就表示已占用。
- 显示屏是以“图像”方式来处理,第60行 ”draw.rectangle” 是先将显示屏涂黑;
- 从80~85行利用Linux针对CPU、内存、存储空间的检测指令,获取显示的数据,并抽取所需要的内容,分别存入CPU、MemUsage与Disk三个变量里;
- 第89~92行就是显示4组数据,因为显示屏的高度为32像素,而每个字符的高度为8像素,因此只能显示4组数据,这里的字符并不支持中文。在代码里面显示的内容是有线网IP、无线网IP、内存使用状况与存储空间的信息。
- 第95~97行则是将前面四行写入的信息,以图像为单位来现实,每一秒更新一次。
下图是这个OLED所显示的内容,与89~92行的输出是一致的。

我们可以尝试修改一下显示的内容,例如有线网IP对Jetbot来说并不重要,但是CPU使用状态是挺有价值的,因此我们可以稍作修改,包含要显示的顺序,例如无线网IP其实只要知道一次就行,可以放到最下面,而内存与CPU的使用状态是相对敏感的,可以将顺位往上调。下面就是修改后的内容:
|
89 90 91 92 |
draw.text((x, top), str(CPU.decode('utf-8')), font=font, fill=255) draw.text((x, top+25), "wlan0: " + str(get_ip_address('wlan0')), font=font, fill=255) draw.text((x, top+8), str(MemUsage.decode('utf-8')), font=font, fill=255) draw.text((x, top+16), str(Disk.decode('utf-8')), font=font, fill=255) |
如果您使用镜像版或者脚本(create-sdcard-image-from-scratch.sh)安装Jetbot,应该修改完存档之后,就会看到OLED屏的显示发生变化。
如果使用容器安装Jetbot的话,这部分需要重建base与display两个容器,需要执行以下步骤让这个改变生效。
|
$ $
$ $ $ |
cd ~/jetbot/docker && ./disable.sh source configure.sh # 只需要重建base与display两个容器 cd base && ./build.sh && cd .. cd display && ./build.sh && cd .. ./enable.sh $HOME/jetbot |
重新启动Jetbot容器之后,就会看到显示屏上的内容已经改变(如下图),这样就能轻松改变OLED的显示内容。

事实上还有很多方式可以操作I2C对OLED的显示处理,在Adafruit所提供的开源项目https://github.com/adafruit/Adafruit_Python_SSD1306下面有些范例代码可以尝试,不过操作前先把Jetbot容器关闭,否则I2C会被占用。
现在对Jetson Nano(含2GB)的I2C检测与操作应该有更进一步的了解,这些内容也适用于Jetson系列其他开发套件,主要差别就是得确认所要使用的I2C编号,例如在Xavier AGX上相同位置的I2C是第9组,因此得在代码中修改 ”i2c_bus=8”,其他部分则完全一样。[完]
来源:业界供稿
好文章,需要你的鼓励


AI对就业的影响:大规模裁员背后的真相与数据
近期数据显示,2026年5月前企业已宣布约9万个与AI相关的裁员岗位,部分预测称未来五年美国15%的工作将被AI取代。然而,Ramp与Revelio Labs追踪近2.2万家企业的最新报告显示:重度投入AI的企业反而实现了更快的人员增长,包括初级岗位在内的各职能人数均有上升。但这一数据主要来自技术型企业,能否普遍适用仍存疑。报告同时指出,资源匮乏的企业可能在AI浪潮中持续落后。

阿里巴巴让AI图像生成模型“自我进化“:Qwen-Image-2.0-RL是如何让机器学会审美的?
阿里Qwen团队通过引入强化学习和在线策略蒸馏,将Qwen-Image-2.0升级为Qwen-Image-2.0-RL,让图像生成模型真正学会人类审美,文生图Elo评分提升78分,图像编辑提升93分。

AI重复申请问题推动电网转向“承诺优先“规划
AI数据中心开发商向多家电力公司同时提交大负荷接入申请以确定选址,导致区域需求预测虚高、电网投资失衡。美国联邦能源监管委员会(FERC)及ERCOT、PJM、SPP等机构正推动"承诺优先"规划机制,要求项目具备实质性商业承诺方可纳入长期传输规划。谷歌、亚马逊、微软、OpenAI等科技巨头支持建立标准化的项目成熟度评估体系,但各方在具体机制上仍存分歧。发电建设问题尚未被纳入联邦传输改革议程。

港科大联手快手,让AI画图“减减肥“:一个让图像生成更真实的小技巧
港科大与快手联合提出NormGuard,针对流匹配模型强化学习训练中速度范数膨胀问题,通过训练时单向惩罚约束,在保留奖励的同时改善图像真实感。
2021
12/28
09:12
分享
点赞

OKX推出AI智能体招聘与支付市场平台
AI编程Token成本将与开发者薪资持平,企业如何应对?
机器学习项目全生命周期管理的成功实践
SVT Robotics的Softbot平台交易量突破40亿笔
杜尔为大众汽车建设跨工厂集成CO?高效涂装车间
AI对就业的影响:大规模裁员背后的真相与数据
AI重复申请问题推动电网转向"承诺优先"规划
美国消费品安全委员会拟出台电动自行车电池安全新规
江波龙:建设完成mSSD月产能百万交付能力!mSSD高速存储介质赋能端侧AI规模应用
从IO500双榜第一,看国产存储的系统级突破
8090 Solutions完成1.35亿美元融资,加速AI软件开发自动化布局
Rocket Lab宣布以80亿美元收购卫星运营商铱星公司
