
JetbotЪЕеНЯЕСа04ЃКCSIЩуЯёЭЗАВзАгыВтЪд
дкзюПЊЪМНщЩмJetbotЕФЪБКђгаЬсЕНЃЌетЬзжЧФмаЁГЕжЛЪЙгУвЛИіCSIЩуЯёЭЗзїЮЊШЋВПЪфШыЕФЩшБИЃЌвђЮЊетжжЩшБИЕФЬхЛ§ЧсЧЩЁЂЙІКФНЯЕЭЃЌВЂЧвNVIDIA JetsonЯЕСагаеыЖдCSIЩуЯёЭЗЬсЙЉвЛзщCamera SubSystemРДЬсИпаЇТЪЃЌЪЧЗЧГЃЪЪКЯгУдкжЧФмГЕЗНАИЩЯЕФЪгЦЕЭМЯёЪфШыгУЭОЃЌЯТБэЪЧИіИїжжЩуЯёЭЗЕФМђЕЅБШНЯБэЃЌетбљОЭФмвЛФПСЫШЛЕиРэНтJetobtЮЊКЮЬєбЁCSIЩуЯёЭЗзїЮЊЪфШыЩшБИЁЃ
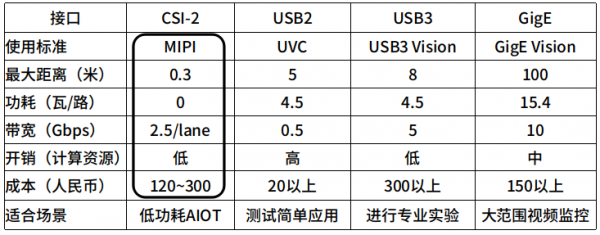
ЪзЯШвЊЬсЪОЕФЃЌJetson NanoЃЈКЌ2GBЃЉЫљжЇГжЕФЪЧCSI-2АцБОНгПкЃЌдчЦкгУдкЪїнЎХЩЩЯ50дЊвдЯТЕФCSIНгПкЩуЯёЭЗЪЧВЛФмЪЙгУЕФЃЌжївЊвдIMX219аОЦЌЕФЩуЯёЭЗЮЊжїЃЌМлИёДѓдМдк100дЊвдЩЯЃЌвђДЫЧыЮ№бЁЙКДэЮѓЁЃ
БОЮФВЂВЛЛЈЪБМфШЅЫЕУїCSIЩуЯёЭЗЕФЙЄзїдРэЃЌжївЊХфКЯJetbotЕФАВзАЃЌвдМАжДаазюМђЕЅжИСюШЅШЗШЯФњЪжЩЯЕФЩуЯёЭЗЪЧСМКУПЩгУЕФЃЌЗёдђЕШећЛњЖМзАКУжЎКѓдйНјааВтЪдЃЌШчЙћгіЕНВЛСМЕФЩуЯёЭЗЛЙЕУдйВ№аЖЯТРДЃЌЪЧвЛМўЦФЮЊРЫЗбЪБМфЕФЪТЧщЁЃ
- НЋCSIЩуЯёЭЗзАЕНJetson NanoЃЈКЌ2GBЃЉЩЯ
етжжНгПкВЂВЛжЇГжМДВхМДгУ(PnP, Plug and Play)ЙІФмЃЌВЛФмЯёUSBЩуЯёЭЗПЩвдЫцЪБВхШыJetson NanoЃЈКЌ2GBЃЉЃЌБиаыдкПЊЛњжЎЧАОЭЯШзАКУЁЃШчЙћПЊЛњКѓВтЪдЗЂЯжВЛГЩЙІЃЌОЭЕУЙиЛњКѓдйМьВщЪЧЗёгаЪВУДЕиЗНАВзАВЛе§ШЗЃПЛђепНгДЅВЛСМЕФЮЪЬтЃЌОЭБуРћадЖјбдЪЧВЛШчUSBЩуЯёЭЗФЧУДЫГЪжЁЃ
АВзАCSIЩуЯёЭЗЕФжжНгПкШчЯТЭМзѓЗНЕФПЈзљЃЌвЊАЮШЁПЈЫёНјааАВзАЪБЧЇЭђаЁаФСІЖШЃЌетИіЫмСЯМўБШНЯДрШѕЃЌвЛВЛаЁаФХЊЖЯСЫЃЌВЛНіЮоЗЈдйАВзАCSIЩуЯёЭЗЃЌвВбЯжигАЯьJetson NanoЃЈКЌ2GBЃЉЕФжЪБЃЃЌашвЊЗЧГЃаЁаФДІРэЃЁ
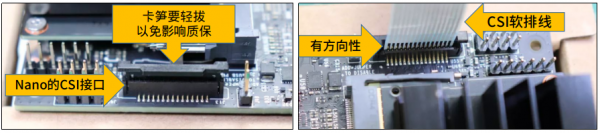
ПЈзљЩЯЭИЙ§вЛИљзЈЪєЕФШэХХЯпЃЈШчЯТЭМгвЃЉгыCSIЩуЯёЭЗНјааСЌНгЃЌетИіШэХХЯпЪЧгаЗНЯђадЕФЃЌШчЩЯЭМгвЫљЯдЪОЃЌШэХХЯпгаН№ЪєеыНХЕФвЛУцвЊГЏФкЃЈКЫаФФЃПщЃЉЗНЯђЃЌНЋХХЯпЭъећШћНјПЈзљжЎКѓЃЌдйНЋПЈЫёЭљЯТбЙЃЌШЗБЃЭъШЋбЙЕЙЕзЃЌЗёдђЩуЯёЭЗПЩФмвђЮЊХХЯпНгДЅВЛСМЖјЮоЗЈе§ГЃЙЄзїЁЃ
ЧыВЮПМhttps://cloud.tencent.com/developer/article/1421907 “ВЫФёЪжВс(2):ИјJetson NanoАВзАCSIЩуЯёЭЗ”вЛЮФЃЌгаЗЧГЃЯъОЁЕФВНжшгыЖЏЬЌМђЭМФмЭъећБэДяЙ§ГЬЁЃзмЖјбджЎЃЌетИіЩуЯёЭЗЕФАВзАгааЉЯИЮЂжЎДІЃЌашвЊЯИаФДІРэЁЃвЛЕЉАВзАВтЪдКУжЎКѓЃЌвВОЁСПВЛвЊВ№аЖЁЃ
- ВтЪдCSIЩуЯёЭЗЕФдЫаа
гЩгкJetbotЛсЙиБеUbuntuЭМаЮзРУцЃЌвђДЫЙ§ШЅЫљбЇЕНЕїгУnvarguscameraжИСюЃЌШЅЦєЖЏCSIЩуЯёЭЗВЂдкЭМаЮзРУцЩЯЯдЪОЕФЗНЗЈЃЌдкетРяЖМВЛФмЪЪгУЃЌЕЋЪЧv4l2-ctlЙЄОпЛЙЪЧФмзізюЛљБОЕФМьВтЁЃ
ЯТУцЕФВтЪдЖМдкJetbotЩЯЕФJupyterЛЗОГЩЯНјааЃЌвВЫГБуНВНтвЛЯТJupyterЩЯЕїгУЩуЯёЭЗгыЯдЪОФкШнЕФЗНЗЈЃЌЯШЪьЯЄвЛЯТетЗНУцЕФЪЙгУЪЧКмживЊЃЌвђЮЊКѓУцЫљгаЪЕбщЖМвЊгУЕНCSIЩуЯёЭЗЁЃ
ЯждкДгPCЩЯЕФфЏРРЦїЪфШы ”<IP_OF_JETBOT>:8888” НјШыJetbotЕФJupyterВйзїНчУцЃЌШЛКѓПЊЦєвЛИіУќСюжеЖЫЃЈШчЯТЭМЃЉЃК
ЯждкЯШгУv4l2-ctlЙЄОпМьВщвЛЯТCSIЩуЯёЭЗЕФзДПіЃЌЧыдкжеЖЫЪфШывдЯТжИСюЃК
|
$
$
$ |
# ШчЙћЪЧDockerАцЃЌЧыЯШАВзАv4l-utilsЙЄОп apt install v4l-utils # жДааМьВтжИСю v4l2-ctl --list-devices # ШчЙћМьВтЕН /dev/video0ЃЌМЬајМьВтетИіЩшБИЕФЯИВПВЮЪ§ v4l2-ctl --device=/dev/video0 --all |
ЯИВПВЮЪ§ОЭВЛЛЈЪБМфЫЕУїЃЌжївЊШУДѓМвжЊЕРЕБгаашвЊЕФЪБКђЃЌОЭПЩвдгУv4l2-ctlетИіЙЄОпВщПДЯИНкЁЃ
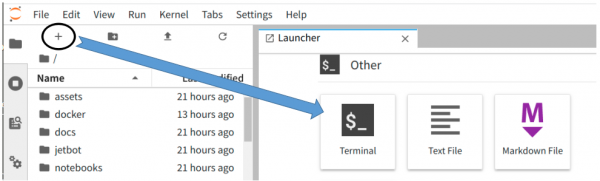
НгЯТШЅПЊЪМгУJupyterЕФДњТыЃЌРДВтЪдCSIЩуЯёЭЗЕФЙЄзїзДПіЁЃЪзЯШДДНЈвЛИіаТЕФ”Notebook”ЃЈШчЯТЭМВНжшЃЉЃЌетЪЧJupyterЕФЙЄзїЧјгђЁЃ
УПДЮаТПЊЕФNotebookЖМЪЧШчЯТЭМЕФзДПіЃЌЛсгавЛИі[ ] гывЛИіЗНПђЃК
ЯждкОЭНЋЯТУцДњТыИДжЦЕНдкNotebookЕФЗНПђФкРяЃЌгЩгкЧАУц“v4l2-ctl”МьВтЕНетИіЩуЯёЭЗЕФПэИпЮЊ(1640, 1232)ЃЌвђДЫдкДњТыжаНЋЩуЯёЭЗгыwidgetsЕФЭМаЮГпДчЖМЩшЮЊетСНИіЪ§зжЃК
|
|
from jetbot import Camera, bgr8_to_jpeg import ipywidgets.widgets as widgets from IPython.display import display import traitlets
camera = Camera.instance(width=1640, height=1232)
image = widgets.Image(format='jpeg', width=1640, height=1232) camera_link = traitlets.dlink((camera, 'value'), (image, 'value'), transform=bgr8_to_jpeg)
display(image) |
ШЛКѓАДвЛЯТ“Ctrl-Enter”зщКЯМќОЭФмжДааЃЌе§ГЃЕФЛАОЭФмдкЯТЗНПДЕНвЛИіЗНПђЯдЪОЩуЯёЭЗЫљВЖзНЕФЖЏЬЌЛУцЃЌетбљОЭЭъГЩCSIЩуЯёЭЗЕФВтЪдЁЃМйШчЗЙОжетИіЯдЪОКУЯёгаЕуаЁбгГйЃЌетЪЧе§ГЃЕФЃЌБЯОЙетРябЁдёЕФЪЧ(1640, 1232)ГпДчЃЌЪдЪдНЋГпДчЖМЫѕаЁЕН1/2жЎКѓЃЌЪЧВЛЪЧОЭСїГЉЕФЖрЃП
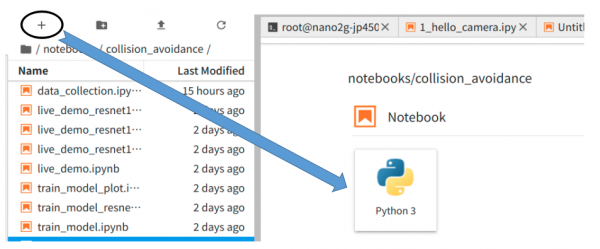
ШчЙћвЊЭЃжЙЩуЯёЭЗВЅЗХЃЌОЭгУЩЯУцЕФ“+”КХЬэМгвЛИі“жИСюИё”ЃЌШЛКѓдкРяУцЪфШы
|
|
camera_link.unlink() |
ШЛКѓгУ“Ctrl-Enter”жДааетИіжИСюЃЌетЪБКђЯдЪОЛУцОЭДІгкЖГНсзДЬЌЃЌВЛЛсВЅЗХЯдЪОЦїЫљВЖзНЕФФкШнЁЃ
МйШчЯывЊШУЩуЯёЭЗдйДЮжДааВЅЗХЃЌОЭдкЯТУцдйЬэМгвЛИі“жИСюИё”ЃЌЪфШы
|
|
camera_link.link() |
АДЯТ“Ctrl-Enter”жДааЃЌОЭЛсПДЕНЯдЪОПђРяЕФФкШнгжПЊЪМжДааЖЏЬЌВЅЗХСЫЁЃ
- ДњТыНтЫЕ
гЩгкJupyterВЂВЛжЇГжOpenGLЙІФмЃЌЮоЗЈЯёЭМаЮзРУцФЧбљжБНгВЅЗХЪгЦЕЃЌвђДЫдкетРяашвЊЪЙгУвЛаЉЙЬЖЈЕФММЧЩЃЌНЋЪгЦЕзЊГЩЭМаЮЗНЪНШЅЯдЪОЃЌЩЯУцетЖЮДњТыПЩвдЫЕЪЧJetbotЫљгаЪЕбщЦєЖЏCSIЩуЯёЭЗЕФБъзМФкШнЁЃ
етИіДњТыжагаМИИіЙиМќЕФВПЗжЃК
- jetbotЕФCameraФЃПщЃК
дчЦкJetbotЕФЩуЯёЭЗЪЧЛљгкNVIDIAЕФJetCamЯюФПЃЌЬсЙЉЖдCSIгыUSBСНРрЩуЯёЭЗЕФжЇГжЃЌВЛЙ§зюаТАцБОжаЗТЗ№жЛЖдCSIЩуЯёЭЗЬсЙЉжЇГжЃЌВЂЧвНЋЕзВуЕФДњТыЗХдкjetbot/cameraЯТУцЕФМИжЛ.pyРяУцЁЃ
етЪЙЕУЕїгУЗНЪНБфЕУЗЧГЃМђЕЅЃЌжЛвЊНЋПэгыИпЬсЙЉИјCamera.instance(Пэ,Ип)ОЭПЩвдЃЌВЛашвЊдйжИЖЈЩуЯёЭЗЕФБрКХЁЃ
- ipywidgetsЃК
етИіФЃПщЮЊjupyterЬсЙЉЗЧГЃКУгУЕФ“ЛЅЖЏЪНаЁВПМў”ЃЌЮЊдБОжЛЬсЙЉОВЬЌЯдЪОЕФНЬбЇЛЗОГЃЌзЂШыЗЧГЃЩњЖЏгыЖрбљЛЏЛЅЖЏЕФЙІФмЁЃ
ЪьЯЄЭМаЮЛЏПЊЗЂЙЄОпЕФХѓгбОЭгІИУжЊЕРЃЌКмЖретРрЙЄОпЛсЬсЙЉЯТРЪНбЁЯюЁЂЛЌПще{ећЁЂИДбЁПђЁЂЮФзжПђетРрЕФаЁВПМўЃЌПЩвдзщНЈНЯЮЊИДдгЕФвЧБэХЬЁЃ
дкКѓУцПижЦJetbotГЕТжЕФЪЕбщжаЛсЪЙгУЕНЖржжетРраЁВПМўЃЌетРяжЛЪЧгУЕНБШНЯМђЕЅЕФwidgets.imageЙІФмЃЌЩшЖЈЪфГіЮЊ ”jpeg”ИёЪНЭМЯёЁЃ
- iPython.displayЃК
етЪЧвЛИіpythonЛЅЖЏЪННчУцРяЕФЯдЪОЙІФмЃЌетРяОЭЪЧНЋwidget.imageЪфГіЕФjpegЭМЯёЯдЪОдкJupyterЁЃ
- traitletsЃК
ШчЙћДгећИігЂЮФзжШЅЗвыЃЌетИіПтОЭБЛГЦЮЊ“ХбЭНПт”ЃЌЦфЪЕЪЧТљЦцЙжЕФЖЋЮїЁЃЕЋШчЙћНЋетИізжЧаИюГЩ ”trait”гы”-let”зщКЯЃЌОЭФмНтЪЭГЩ“аЁЬиеї”ЕФКЌвхЃЌР§ШчbookletЪЧаЁВсзгЁЂeagletЪЧаЁРЯгЅЕФвтЫМЁЃ
етИіПтЕФЙІФмЗЧГЃЧПДѓЃЌГ§СЫФмЮЊЮвУЧДІРэ“РраЭМьВщ”жЎЭтЃЌЛЙФмЮЊЖЏЬЌМЦЫуЬсЙЉдЄЩшжЕЁЂаоИФЪєаджЎКѓЗЂГіИќИФЕФЪТМўаХКХЁЂДІРэЪєаджЕжЎМфЕФНЛЛЅгАЯьЃЌЮЊЮвУЧМђЛЏКмЖрИДдгЕФНЛДэЙиЯЕЁЃ
дкЩЯЪіДњТыжа”camera_link=traitlets.dlink((camera, 'value'), (image, 'value'), transform=bgr8_to_jpeg)”ЃЌНЋЩуЯёЭЗЖСШЁЕФЭМЯёгыwidgets.imageЫљДДНЈЕФimageЖдЯѓВњЩњЖЏЬЌЙиСЊЃЌВЂНЋЩуЯёЭЗЭМаЮжДаа“bgr8_to_jpeg”зЊЛЛЃЌДцЗХЕНimageРяЃЌзюКѓдйгЩdisplay(image)ЯдЪОГіРДЁЃ
жСгкcamera_linkЮяМўОЭФмдкКѓУцЭИЙ§.link()гы.unlink()жДааПЊЙиШЫШЮЮёЃЌвдЪЕЯж“днЭЃ”гы“дйЦєЖЏ”ЕФЙІФмЁЃ
етбљЮвУЧЖдJetbotЩуЯёЭЗЕФЕїгУгыЪЙгУЃЌОЭгаИіГѕВНЕФСЫНтЃЌдкКѓУцЪЕбщжаОЭФмИќЧхГўЕФИаЪмЕНетаЉЙІФмЕФЪЙгУЁЃ[Эъ]
РДдДЃКвЕНчЙЉИх
КУЮФеТЃЌашвЊФуЕФЙФРј


LinuxЛљН№ЛсГЩСЂжЧФмЬхAIЛљН№ЛсЭГвЛЙмРэаавЕБъзМ
LinuxЛљН№ЛсаћВМГЩСЂДњРэAIЛљН№ЛсЃЌЮЊAIжЧФмЬхЛљДЁЩшЪЉПЊЗЂЬсЙЉГЇЩЬжаСЂЕФМрЖНЁЃОЁЙмвЕНчГаШЯAIжЧФмЬхДцдкАВШЋЮЪЬтЃЌИпЕТФЩзЩбЏЙЋЫООЏИцаэЖрЦѓвЕЯюФППЩФмвђШБЗІЩЬвЕМлжЕЖјБЛШЁЯћЃЌЕЋЛљН№ЛсШджТСІгкЮЊAIЙЋЫОЬсЙЉжаСЂЦНЬЈЁЃAnthropicЁЂBlockКЭOpenAIЗжБ№ЙБЯзСЫШ§ИіЯюФПЃЌАќРЈФЃаЭЩЯЯТЮФавщЁЂПЊдДAIжЧФмЬхПђМмКЭЛњЦїПЩЖСЮФЕЕБъзМЁЃ

ПьЪжПЦММЬсГіаТЗНЗЈЃКШУAIбЕСЗВЛдйЁАЗГЕЁАЕФжЧЛлдМЪјЛњжЦ
ПьЪжПЦММбаОПЭХЖгЬсГіСЫьиБШНиЖЯЛњжЦЃЌгУгкНтОіЧПЛЏбЇЯАбЕСЗжаAIШнвз"зпЦЋ"ЕФЮЪЬтЁЃИУЗНЗЈЭЈЙ§МрПиAIбЇЯАЧАКѓЫМЮЌЛюдОЖШБфЛЏЃЌдкЙиМќЪБПЬНјааОЋзМИЩдЄЃЌМШБЃжЄбЕСЗЮШЖЈадгжЮЌГжЬНЫїФмСІЁЃдкЪ§бЇЭЦРэШЮЮёжаЃЌДЫЗНЗЈЯджјЬсЩ§СЫФЃаЭадФмВЂИФЩЦСЫбЕСЗЮШЖЈадЃЌЮЊAIбЕСЗСьгђЬсЙЉСЫаТЕФНтОіЫМТЗЁЃ

ЮЂШэаћВМЮДРДЫФФъНЋдкгЁЖШЭЖзЪ175вкУРдЊРЉДѓAIвЕЮё
ЮЂШэМЦЛЎдкЮДРДЫФФъФкЯђгЁЖШЭЖзЪ175вкУРдЊЃЌетЪЧИУЙЋЫОдкбЧжоЕФзюДѓЭЖзЪЁЃЭЖзЪНЋгУгкНЈЩшаТЪ§ОнжааФЁЂAIЛљДЁЩшЪЉКЭММФмХрбЕЯюФПЁЃДЫОйе§жЕШЋЧђПЦММОоЭЗМгЫйдкгЁЖШВМОжЃЌИУЙњХгДѓЕФЛЅСЊЭјКЭжЧФмЪжЛњгУЛЇШКЬхЪЙЦфГЩЮЊЙиМќеНГЁЁЃЭЖзЪЛЙАќРЈдкКЃЕТРАЭНЈЩшаТЪ§ОнжааФЧјгђЃЌВЂгыгЁЖШеўИЎКЯзїНЋAIФмСІећКЯЕНЙЋЙВЪ§зжЦНЬЈжаЁЃ

EditThinkerЃКЕБAIБрМЭМЦЌвВбЇЛсЁАШ§ЫМЖјКѓааЁА - ББКНгыУРЭХСЊКЯбаОПШУЭМЯёБрМНјШыЁАЩюЖШЫМПМЁАЪБДњ
EditThinkerЪЧББОЉКНПеКНЬьДѓбЇгыУРЭХЕШЛњЙЙСЊКЯбаЗЂЕФЭМЯёБрМAIПђМмЃЌШУAIдкБрМЭМЦЌЪБФмЙЛЯёШЫРрвЛбљНјааЗДИДЫМПМКЭгХЛЏЁЃИУЯЕЭГЭЈЙ§"ХњЦР-гХЛЏ-жиЪд"ЕФбЛЗЛњжЦЃЌНЋДЋЭГЕФвЛДЮадБрМзЊБфЮЊЕќДњИФНјЙ§ГЬЃЌдкЫФИіШЈЭўВтЪдЦНЬЈЩЯЯджјЬсЩ§СЫЯжгаБрМФЃаЭЕФБэЯжЃЌЬиБ№ЪЧдкашвЊИДдгЭЦРэЕФБрМШЮЮёжааЇЙћЭЛГіЁЃ
2021
12/21
15:22
ЗжЯэ
Еудо

LinuxЛљН№ЛсГЩСЂжЧФмЬхAIЛљН№ЛсЭГвЛЙмРэаавЕБъзМ
ЮЂШэаћВМЮДРДЫФФъНЋдкгЁЖШЭЖзЪ175вкУРдЊРЉДѓAIвЕЮё
Window Maker Live 13.2ЛљгкDebian 13ЮЊ32ЮЛPCДјРДаТЩњ
CoderЭЦГіЛьКЯШЫдБгыжЧФмЬхПЊЗЂЭХЖгжЮРэММЪѕеЛ
баОПШЫдБЗЂЯжащФтЛњЙмРэГЬађРеЫїШэМўЙЅЛїМЄді700%
AIММЪѕПьЫйЕќДњЦШЪЙЦѓвЕУП90ЬьжиЙЙММЪѕеЛ
ХЕЛљбЧгыАЂРЪЦѓвЕКЯзїЭЦГіЖЫЕНЖЫдАЧјЭјТчЗўЮё
МзЙЧЮФКьХЃГЕЖгЃКгУдЦМЦЫуЁЂAIКЭЪ§ОнЧ§ЖЏF1ЮДРД
аТдЦМЦЫуНЋЬєеНДЋЭГдЦОоЭЗAIЛљДЁЩшЪЉжїЕМЕиЮЛ
AnthropicгыАЃЩемДяГЩДѓЙцФЃAIКЯзїавщ
ДгвЛЬѕДјгуЕНвЛБДЬРцжЃЌЦДЖрЖрШчКЮгУЁАЧЇвкЗіГжЁБИФаДЙЉИјЙЪЪТЃП
ДђЭЈЁАзюКѓвЛЙЋРяЁБЕФГжДИШЫЃКвЛМвРЯХЦЗжЯњЩЬЕФAIЭЛЮЇгыГіКЃвАЭћ
JetsonАйЭђПЊЗЂепЙЪЪТ | ЮЊСЫКЂзгЕФНЁПЕГЩГЄЃЌЫћгУNVIDIA JetsonзіСЫвЛИіЯѓЦхЛњЦїШЫ
JetsonАйЭђПЊЗЂепЙЪЪТ | ЭЈЙ§Jetson NANOеЙЯжCVЪЕМљМлжЕ
JetsonПЊЗЂепЦЦАйЭђЃЌПьРДЫЕГіФуЕФПЊЗЂЙЪЪТАЩ
е§ЕБЪБ NVIDIA Jetson NanoШУжЧФмЛњЦїШЫПЊЗЂвзШчЗДеЦ
OrinПЊЗЂЬзМў04-АВзАDeepStream
Jetson OrinПЊЗЂЬзМў03-АВзАПЊЗЂЛЗОГ
TAOЯЕСа12-НЋФЃаЭВПЪ№ЕНJetsonЩшБИ
TAOЯЕСа06-ЪгОѕРрЕФЪ§ОнИёЪН
GTC22 | JetsonПЊЗЂепШеРДСЫ ПьРДЕуЛїдЄдМ
JetbotЯЕСа13-ЭМЯёЛиЙщЗЈЪЕЯжбТЗЙІФм
