
Jetson NANO 2GB系列文章(18):Utils的videoSource工具
前两篇已经用10行Python代码展现了Hello AI World强大而且简便的物件检测识别能力,虽然大部分的人都将目光集中在了深度学习的三大推理识别(图像分类、物件检测、语义分割),但是在整个项目中,其实还有两个非常重要的功臣功能,那就是videoSource()与videoOutput()这两个专司输入与输出的接口。
如果你认为这两个功能只是简单地负责数据接收与显示的话,这就大大浪费了项目作者的心血结晶,因此我们在进入本项目另外两个深度学习推理应用之前,先要把这两个幕后功臣的内涵展现出来,因为这与后面的应用息息相关。
本文先就videoSource()这个功能进行说明。
有经验的开发人员都清楚,输入源的种类十分多样,并且格式非常繁琐,其中还包括图像的颜色空间(color space)变化,要全部集成在一个函数中去调用,已经是非常高难度的事情了,如果这个函数还能为我们集成Jetson的编解码芯片的调用,以及将许多非常图像处理的计算交由CUDA核去计算,这就是一个值得我们为之欢呼的功能了。
videoSource()功能是项目作者一个集大成的作品,具备以下特点:
- 支持7种输入源方式:
- CSI摄像头:”csi://0”
- USB摄像头:”/dev/video<N>”,其中<N>置换成指定的USB摄像头编号
- RTP视频流:”rtp://<remote_ip>:1234”
- RTSP视频流:”rtsp://username:password@<remote-host>:1234”
- 视频文件:”完整文件名”,例如 ”input.mp4”
- 图像文件:”完整文件名”,例如 “room_0.jpg”
- 文件夹:如果识别”完整文件名”是个文件夹时,就会把目录下文件整批作为输入
- 支持7种视频格式:H.264、 H.265、VP8、 VP9、 MPEG-2、MPEG-4以及MJPEG
- 支持9种图像格式:JPG、 PNG、TGA、BMP、GIF、PSD、 HDR、 PIC以及PNMs
- 自动根据数据源,调用合适的NVDEC解码功能
- 将数据计算紧密结合CUDA计算核
这样一列出来,是否已经感受到了这一功能的强大呢?由于集成这么多特点,可以使代码的调用变得异常简单,而且完全发挥Jetson Nano 2GB的硬件计算资源,兼具“易用”与“高效”两个极端的特色。接下来我们就用几个简单的代码,带着大家体验一下这个工具的用法。
现在请大家先回忆一下用openCV建立CSI摄像头对象的代码,如下:
|
1 |
cameraCsi = cv2.VideoCapture( "nvarguscamerasrc sensor-id=0 ! " "video/x-raw(memory:NVMM), width=(int)1280, height=(int)720, " "format=(string)NV12, framerate=(fraction)60/1 ! " "nvvidconv flip-method=0 ! " "video/x-raw, width=(int)1280, height=(int)720, format=(string)BGRx ! " "videoconvert ! video/x-raw, format=(string)BGR ! appsink" ) |
这种调用是非常艰涩而且容易出错的,对大部分初学者来说的确比较痛苦,导致很多人一开始都不愿意使用性能较好、功耗较低的CSI摄像头。但是在videoSource()这里,只需要简单填入 ”csi://0” 就能创建。
在前面“10lines.py”代码中,已经提供了CSI摄像头、USB摄像头,以及视频文件的调用方式,事实上类似的方法也适用于RTP/RTSP视频流以及图像文件作为输入源。
然而这里面增加一个对“文件夹”的支持,更是一个非常实用的功能,不过在“图像分类”、”物件识别“与“语义分割”的应用中,都有很大部分的使用场景是针对“众多独立图像”的推理,如果每次都只能一张一张的读入然后识别,就会显得十分没效率。
下面将“10lines.py”做简单的修改,以jetson-inferencet提供的图像文件为例,让大家体验一下这个功能的好处:
|
import jetson.utils input = jetson.utils.videoSource("source") output = jetson.utils.videoOutput("detection")
import jetson.inference net = jetson.inference.detectNet("ssd-mobilenet-v2", threshold=0.5)
while output.IsStreaming(): img = input.Capture() detections = net.Detect(img) output.Render(img) |
上面代码中,将输入源与输出标的设为两个不同的目录,执行之前先将这个代码复制到~/jetson-inference/data/images/去,并且为source目录添加一些图片。完整的执行指令如下:
|
1 2 3 4 5 |
|
这样就会开始从source目录读入图像文件,执行物件识别推理后,将结果输出到detection目录中(如下图)。
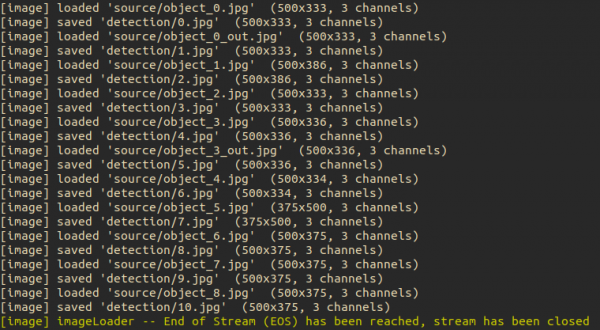
这里之所以不选择输出到显示器,是因为显示的过程太快,没法在显示器上暂留,所以输出到另一个目录存成图片,会是比较合适的方法。
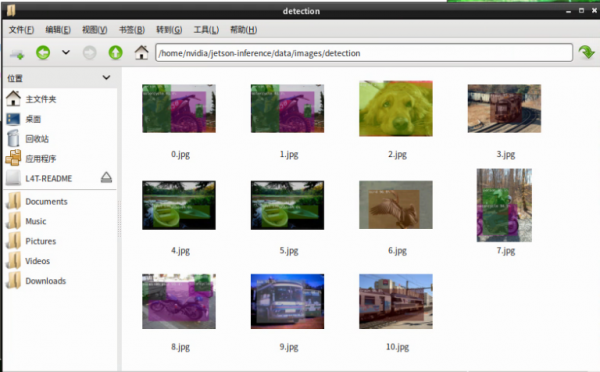
执行完成后,进入detection目录中,可以浏览到如下图的输出结果。
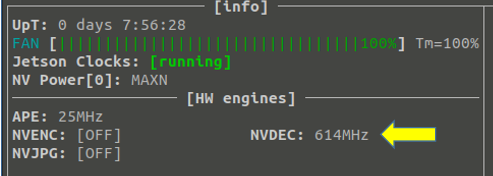
最后还有一个重点,就是调用NVDEC硬解码器的时机,前面提到videoSourec()会自动根据输入源的类型,去调用合适的解码器,不过这部分细节在作者的使用文档中并没有讲解,只能靠不断地尝试。
要检查解码器的启动与否,我们可以使用一开始教大家的jetson-stats检测工具,打开之后关注左下角“NVDEC”的变化,大部分时候都是处于[OFF],但当我们的输入源是视频文件、RTP/RTSP这三种类型时,“NVDEC”后面会出现主频的变化(如下图),表示这时候已经被启动。
本文有条理地将videoSource()的重要特色进行了说明,就是为了后面执行其他推理识别应用时会使用到,也希望能让读者学会更多的用法。
来源:业界供稿
好文章,需要你的鼓励


Albertsons借助Databricks构建零售商品智能决策平台
美国连锁超市巨头Albertsons正在基于Databricks构建商品智能平台,整合产品、定价、促销与陈列等决策功能,目标是在2026年底前全面向门店运营商落地。该平台以Databricks Lakehouse存储零售数据,通过Unity Catalog与AI Gateway实现数据治理,并借助AI智能体Genie支持自然语言查询,帮助商家洞察销售趋势,提升决策效率。此举是Albertsons今年四项AI核心战略投资之一。

阿里巴巴让AI图像生成模型“自我进化“:Qwen-Image-2.0-RL是如何让机器学会审美的?
阿里Qwen团队通过引入强化学习和在线策略蒸馏,将Qwen-Image-2.0升级为Qwen-Image-2.0-RL,让图像生成模型真正学会人类审美,文生图Elo评分提升78分,图像编辑提升93分。

微软正式将 Windows 11 打造为 AI 操作系统
微软正将Windows 11打造成真正的AI操作系统。在Build大会上,微软展示了AI模型与智能代理如何深度融合进Windows 11,让用户通过自然语言完成系统操作。借助Windows ML框架,超过5亿台PC已可在本地离线运行AI任务,无需联网、无token费用、数据不离设备。Office、Photos、Teams等应用已支持本地AI能力,Adobe、WhatsApp、Canva等第三方也在积极跟进,企业级AI PC采购需求有望加速。

港科大联手快手,让AI画图“减减肥“:一个让图像生成更真实的小技巧
港科大与快手联合提出NormGuard,针对流匹配模型强化学习训练中速度范数膨胀问题,通过训练时单向惩罚约束,在保留奖励的同时改善图像真实感。
2021
06/01
09:43
分享
点赞

Albertsons借助Databricks构建零售商品智能决策平台
微软正式将 Windows 11 打造为 AI 操作系统
工作中使用未授权AI工具之前,请三思
全球首座AI博物馆Dataland:用数据创造多感官视觉盛宴
ANS框架:Linux基金会为AI智能体建立DNS式信任机制
Hirebotics推出无代码防爆协作机器人,专为工业喷涂设计
美国消费品安全委员会拟出台电动自行车电池安全新规
江波龙:建设完成mSSD月产能百万交付能力!mSSD高速存储介质赋能端侧AI规模应用
从IO500双榜第一,看国产存储的系统级突破
Rocket Lab宣布以80亿美元收购卫星运营商铱星公司
OpenAI携手Trail of Bits发起"Patch the Planet"开源安全修复计划
公共电力性价比优势面临多年来最严峻考验
