
Orin开发套件05-使用Docker容器的入门技巧
上一篇内容为大家介绍了从NVIDIA NGC下载DeepStream 6.1的容器版镜像到本地在Jetson上设备的基础指令,不过在正式使用容器版DeepStream 6.1之前,我们还是需要为入门用户提供基本的使用方式与一些小技巧。
Jetson Orin开发套件内置64GB EMMC存储,并且很容易扩充64G甚至更大的NVME存储设备,可以有非常充沛的空间,在这种情况下就非常推荐使用Docker容器技术,能有效简化应用软件的安装与调试工作,非常适合用来开发与部署较为复杂的多功能智能应用,并且在NVIDIA NGC上提供了非常丰富的Docker版本应用镜像文件,用户只要一条指令便可轻松下载使用,这是边缘计算非常重要的一项应用技术。
Docker是一种比较新的“容器”技术,是NVIDIA近年来非常大力推广的应用重点,越来越多的GPU开发环境都以Docker镜像(或称为“仓”)形式提供,具备以下的优点与特性:
- 轻量级:这是相较于虚拟机的比对,容器内不需要独立操作系统,它是基于主机上的操作系统,透过一些映射指令去指向资源路径。大部分的容器镜像都在数十MB到数GB大小规模。
- 硬件调度能力:这是NVIDIA非常喜欢Docker容器技术的重点之一,虚拟机环境对GPU支持能力并不好,得透过底层穿透(pass through)方式调用,但容易影响系统稳定性。Docker容器直接与操作系统交互运作,只要主机上操作系统装好NVIDIA GPU的驱动,甚至不需要安装CUDA开发包,在Docker容器内就能轻松用上GPU并行计算的功能。
- 封装完整:相较于conda或virtualenv这类环境虚拟技术而言,Docker容器的封装更为完整而且独立,这在开发Python相关应用时更加明显,因为Python版本升级太频繁,相关依赖包之间的版本牵动关系复杂,而Docker容器的封装就显得非常有效,并且移植十分简便。
Docker作为一个开源的应用容器引擎,允许开发者很方便地打包应用程序和依赖库到可移植的容器中,然后发布到任何流行的Linux设备上,Docker完全使用沙箱机制,容器之间相互独立,不存在任何接口,因此,允许开发者在同一台机器上,运行不同环境的应用程序与服务,大大简化应用程序(或者服务)的运维操作,同时也提高了开发与测试效率。
对于CUDA设备的调用,需要NVIDIA自行开发的nvidia-docker2指令转换插件的协助,在x86设备上都需要自行安装Docker管理机制与nvidia-docker2界面,不过JetPack都为Jetson安装好了这两个元件,我们只要使用就可以。
现在就开始教大家如何使用Docker容器,以及从NVIDIA NGC中心下载可以在Jetson设备上使用的镜像。
- 检查Docker环境与修改储存路径:
用JetPack安装好系统之后,直接输入以下指令,就能检查目前系统中Docker的所有状态信息:
|
$ |
sudo docker info |
可以看到一长串关于Docker环境的内容,由于信息量较大就不在这里单独列出所有内容。如果要单纯查看版本号,只要执行以下指令就可以:
|
$ |
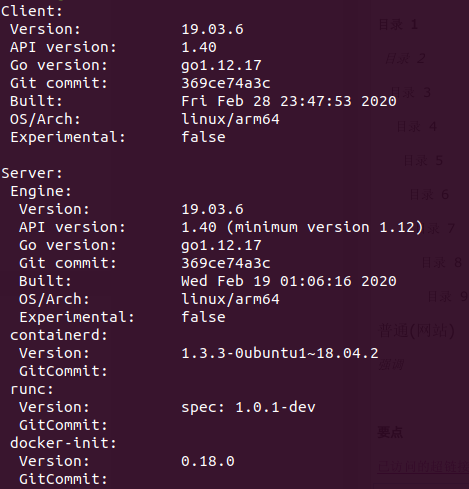
sudo docker version |
现在会看到如下版本信息,包括用户(Client)端与服务(Server)端:
如果要看最简单的版本信息,那么下面指令是最适合的:
|
$ |
sudo docker --version |
要检查目前Docker系统放置镜像文件的路径,可以执行以下指令:
|
$ |
sudo docker info | grep -i root |
系统预设的存放路径为 /var/lib/docker,如果有自己添加的额外NVME存储设备,可以在 /etc/docker/daemon.json文件中添加以下粗体的指令,调整存放路径:
|
|
# 文件 /etc/docker/daemon.json { "data-root": "<自己指定路径>", "runtimes": { "nvidia": { "path": "nvidia-container-runtime", "runtimeArgs": [] } } } |
修改完后执行以下指令,让新的设定值生效:
|
$ $ |
sudo systemctl daemon-reload sudo systemctl restart docker.service |
现在可以检查看看存储的路径是否更新。
- 简化Docker指令:
这个应用完全依赖指令操作,在Ubuntu操作系统时又需要“sudo”取得操作权限,例如执行“docker info”指令,会出现下面信息,表示权限不足。

我们可以执行以下步骤,在执行Docker指令时可以不需要使用“sudo”:
|
$ $ $ $ |
sudo groupadd docker sudo gpasswd -a ${USER} docker sudo service docker restart newgrp - docker |
当然,这只是简化权限的问题,仅提供一个参考。
- 从NGC寻找合适的镜像文件
访问http://ngc.nvidia.com/ 会出现如下画面,在左上方“搜索栏(漏斗图标)”中输入“l4t”关键字,就会列出能在Jetson上运行的镜像列表。

目前已经提供近20个容器镜像,分为以下6大类别:
- 基础类:
- NVIDIA L4T Base:
https://catalog.ngc.nvidia.com/orgs/nvidia/containers/l4t-base
- NVIDIA L4T CUDA:
https://catalog.ngc.nvidia.com/orgs/nvidia/containers/l4t-cuda
- NVIDIA Container Toolkit:
https://catalog.ngc.nvidia.com/orgs/nvidia/teams/k8s/containers/container-toolkit
- 深度学习类:
- NVIDIA L4T ML:深度学习综合开发环境
https://catalog.ngc.nvidia.com/orgs/nvidia/containers/l4t-ml
- NVIDIA L4T PyTorch:
、 https://catalog.ngc.nvidia.com/orgs/nvidia/containers/l4t-pytorch
- NVIDIA L4T TensorFlow:
https://catalog.ngc.nvidia.com/orgs/nvidia/containers/l4t-tensorflow
- NVIDIA L4T TensorRT:
https://catalog.ngc.nvidia.com/orgs/nvidia/containers/l4t-tensorrt
- 视觉类:
- DeepStream-l4t
https://catalog.ngc.nvidia.com/orgs/nvidia/containers/deepstream-l4t
- DeepStream L4T - Intelligent Video Analytics Demo
https://catalog.ngc.nvidia.com/orgs/nvidia/helm-charts/video-analytics-demo-l4t
- DeepStream People Detection Demo on Jetson
https://catalog.ngc.nvidia.com/orgs/nvidia/containers/deepstream-peopledetection
- Gaze Demo for Jetson/L4T
https://catalog.ngc.nvidia.com/orgs/nvidia/containers/jetson-gaze
- Pose Demo for Jetson/L4T
https://catalog.ngc.nvidia.com/orgs/nvidia/containers/jetson-pose
- 对话类:
- Voice Demo for Jetson/L4T
https://catalog.ngc.nvidia.com/orgs/nvidia/containers/jetson-voice
- Riva Speech Skills
https://catalog.ngc.nvidia.com/orgs/nvidia/teams/riva/containers/riva-speech
- 教学类:
- DLI Getting Started with AI on Jetson Nano
https://catalog.ngc.nvidia.com/orgs/nvidia/teams/dli/containers/dli-nano-ai
- DLI Building Video AI Applications at the Edge on Jetson Nano
https://catalog.ngc.nvidia.com/orgs/nvidia/teams/dli/containers/dli-nano-deepstream
- 医疗类:专属于Clara AGX的应用容器镜像。
- 下载NVIDIA L4T ML镜像并创建容器
这是能在Jetson设备上执行的最完整的机器学习(Machine Learning)软件栈镜像,访问https://catalog.ngc.nvidia.com/orgs/nvidia/containers/l4t-ml 之后就能看到容器内所包含的内容,以l4t-ml:r32.6.1-py3版本为例,其打包的工具与功能库如下:
- TensorFlow 1.15.5
- PyTorch v1.9.0
- torchvision v0.10.0
- torchaudio v0.9.0
- onnx 1.8.0
- CuPy 9.2.0
- numpy 1.19.5
- numba 0.53.1
- OpenCV 4.5.0 (with CUDA)
- pandas 1.1.5
- scipy 1.5.4
- scikit-learn 0.23.2
- JupyterLab 2.2.9
这已经涵盖我们所需要的绝大部分内容,只要下载镜像后生成执行的容器,就能直接使用里面的开发环境,这样能节省非常大量的安装与调试的时间。
点击页面右上角“Pull Tag”按钮,会列出目前可下载版本的镜像文件,最好选择配合目前JetPack版本的镜像,例如用JetPack 5.0DP安装的Jetson Orin开发套件,其L4T版本为34.1.1,就用下面指令下载r34.1.1-py3镜像:
|
$ |
docker pull nvcr.io/nvidia/l4t-ml:r34.1.1-py3 |
下载完成之后可以用以下指令检查:
|
$ |
docker images |
如果出现以下信息,则表示下载完成。
|
REPOSITORY TAG IMAGE ID CREATED SIZE nvcr.io/nvidia/l4t-ml r34.1.1-py3 93c715e8751b 6 weeks ago 16.2GB |
这个方法可以用在任何L4T版本镜像文件上。
下一篇文章我们将进一步带着大家用这个镜像文件去创建容器,并且开始执行演示或开发的内容。
来源:业界供稿
好文章,需要你的鼓励


人工智能落地“最后一公里”,戴尔工作站助力AI应用提速
英特尔携手戴尔以及零克云,通过打造“工作站-AI PC-云端”的协同生态,大幅缩短AI部署流程,助力企业快速实现从想法验证到规模化落地。

意大利ISTI研究院推出Patch-ioner:一个神奇的零样本图像描述框架,让电脑像人一样描述任何图像区域
意大利ISTI研究院推出Patch-ioner零样本图像描述框架,突破传统局限实现任意区域精确描述。系统将图像拆分为小块,通过智能组合生成从单块到整图的统一描述,无需区域标注数据。创新引入轨迹描述任务,用户可用鼠标画线获得对应区域描述。在四大评测任务中全面超越现有方法,为人机交互开辟新模式。

阿联酋MBZUAI发布PAN世界模型,AI仿真技术迎来突破
阿联酋阿布扎比人工智能大学发布全新PAN世界模型,超越传统大语言模型局限。该模型具备通用性、交互性和长期一致性,能深度理解几何和物理规律,通过"物理推理"学习真实世界材料行为。PAN采用生成潜在预测架构,可模拟数千个因果一致步骤,支持分支操作模拟多种可能未来。预计12月初公开发布,有望为机器人、自动驾驶等领域提供低成本合成数据生成。

MIT团队重磅发现:不配对的多模态数据也能让AI变得更聪明
MIT研究团队发现,AI系统无需严格配对的多模态数据也能显著提升性能。他们开发的UML框架通过参数共享让AI从图像、文本、音频等不同类型数据中学习,即使这些数据间没有直接对应关系。实验显示这种方法在图像分类、音频识别等任务上都超越了单模态系统,并能自发发展出跨模态理解能力,为未来AI应用开辟了新路径。
2022
07/29
09:37
分享
点赞

人工智能落地“最后一公里”,戴尔工作站助力AI应用提速
《2025 中国企业级 AI 实践调研分析年度报告》:深度剖析与价值洞察
Gartner:在中国构建AI软件工程技能的三大举措
阿联酋MBZUAI发布PAN世界模型,AI仿真技术迎来突破
Nvidia和Google支持的AI代码编辑器Cursor获23亿美元融资
Anthropic披露首例Claude模型参与的AI网络间谍活动
Cadence首款系统芯粒架构成功流片,助力物理AI发展加速
百度发布定制AI加速器响应国产芯片需求
VasEdge试用火热招募,降本增效机遇来袭
Infinidat InfiniBox G4系列升级重塑高端企业存储格局
Avalonia为微软MAUI跨平台应用方案带来Linux和浏览器支持
谷歌DeepMind发布SIMA 2智能体:游戏世界中学习迈向AGI之路
分析:NVIDIA第二季度财报再次超出预期背后的新问题
Jetson百万开发者故事 | 校企合作推动实现多项工业场景下AI边缘计算应用
Jetson百万开发者故事 | NVIDIA Jetson助力水产养殖企业打造自动化流水线
Jetson百万开发者故事 | 基于Jetson Nano的便携式岩石分类检测系统:地质学家的新利器
Jetson百万开发者故事 | 让AI成为铁路客运站自动扶梯安全管控的关键
Jetson百万开发者故事 | Jetson开发者突破百万,从TK1到Orin我都经历了啥
百万Jetson开发者故事
Jetson百万开发者故事 | NVIDIA Jetson如何成为可移动智能脑机交互平台
全新NVIDIA Jetson Orin NX 16GB大幅提升边缘AI性能
Triton推理服务器13-模型与调度器(3)
