
NVIDIA Jetson Nano 2GB 系列文章(36):加入USB输入与RTSP输出
本文以上一期Python版的deepstream-teat1为基础,分别在输入与输出添加功能的两个扩展应用:deepstream-teat1-usbcam与deepstream-teat1-rtsp-out,分别将输入源从视频文件变成USB摄像头,以及将输出从显示屏变成RTSP视频流。接下去同样从代码内容来看看这两个部分需要进行怎样的修改。
- 将输入源从视频文件修改成USB摄像头
- 文件路径:<DeepStream>/sources/deepstream_python_apps/apps的deepstream-test1-usbcam/deepstream_test_1_usb.py
- 范例功能:将deepstream-test1的视频文件输入改成USB摄像头
- 插件流:v4l2src --> videoconvert--> nvvideoconvert --> nvstreammux --> nvinfer --> nvvideoconvert --> nvdsosd --> nvegltransform --> nveglglessink
- 修改重点:
- 将原本数据源插件从filesrc改成v4l2src
- 将原本格式转换插件从h264相关的,改成符合USB摄像头原始数据格式相关的
现在进去看看deepstream_test_1_usb.py与前面deepstream_test_1.py有那些修改的地方。
首先在创建阶段的修改,原本用H264视频文件输入的部分,需要以下四个元件:
|
source = Gst.ElementFactory.make("filesrc", "file-source") h264parser = Gst.ElementFactory.make("h264parse", "h264-parser") decoder = Gst.ElementFactory.make("nvv4l2decoder", "nvv4l2-decoder") streammux = Gst.ElementFactory.make("nvstreammux", "Stream-muxer") |
如今要改成USB摄像头输入时,就需要把输入的元件改成以下六个元件:
|
source = Gst.ElementFactory.make("v4l2src", "usb-cam-source") caps_v4l2src = Gst.ElementFactory.make("capsfilter", "v4l2src_caps") vidconvsrc = Gst.ElementFactory.make("videoconvert", "convertor_src1") nvvidconvsrc=Gst.ElementFactory.make("nvvideoconvert", "convertor_src2") caps_vidconvsrc = Gst.ElementFactory.make("capsfilter", "nvmm_caps") streammux = Gst.ElementFactory.make("nvstreammux", "Stream-muxer") |
这里面的第3~4行添加videoconvert->nvvideoconvert的元件,最主要是因为nvvideoconvert并不支持所有原始格式,例如某些品牌usb摄像头常用的YUYV这种格式,但是我们需要获得nvvideoconvert所能支持的摄像头原始格式,于是GStreamer的videoconvert就能起到调节的作用。
Videoconvert插件确保提供支持原始格式的超集,然后再由nvvideoconvert插件调用NvBufSurface API将传入的原始缓冲区,转换格式存到NVMM Mem里。
接下去在设置caps_v4l2src与caps_vidconvsrc元件参数的部分,并将输入源设定为程式所接受的第一个参数指,最后还设置“sync=false”以避免在显示接收器处出现延迟帧下降,其他设定指与test1的内容一致:
|
caps_v4l2src.set_property('caps', Gst.Caps.from_string("video/x-raw, framerate=30/1")) caps_vidconvsrc.set_property('caps', \ Gst.Caps.from_string("video/x-raw(memory:NVMM)")) source.set_property('device', args[1]) 。。。。 sink.set_property('sync', False) |
后面的元件添加、元件连接、创建事件循环、播放并收听事件等部分的代码,则与deepstream_test_1.py是一致的,甚至osd_sink_pad_buffer_probe的代码也是完全一样的,这表示我们只要简单地将输入阶段的插件进行合适的替换,就能修改输入源的变更,十分简单。
请先将USB摄像头连接到设备上,然后执行以代码:
|
cd <DeepStream根目录>/sources/deepstream_python_apps/apps cd deepstream-test1-usbcam python3 deepstream_test_1_usb.py |
下面截屏就是打开USB摄像头,对着屏幕上播放的视频进行识别的结果:

总的来说,大约就修改不到10行的内容,就将原本视频文件输入的功能改成USB输入的方式,里面最关键的重点就在于需要加入videoconvert这个插件,来适应各个摄像头硬件厂家所支持的原始格式。
您可以比照这个放松,自行尝试将输入源修改成CSI摄像头或IP摄像头输入,或者可以在多种输入源中任选一种作为输入的方式。
- 将输出从显示屏转成RTSP视频流
- 文件路径:<DeepStream>/sources/deepstream_python_apps/apps的deepstream-test1-rtsp-out/deepstream_test1_rtsp_out.py
- 范例功能:将deepstream-test1的输出透过RTSP协议转向其他电脑
- 修改重点:在nvdsosd之后添加将格式转成符合RSTP协议的H264格式,主要如下:
- nvvideoconvert:将视频颜色格式从RGBA转换成I420
- CapsFilter:对数据实施限制(无数据修改)
- nvv4l2h264enc:将I420格式的原始数据转成H264编码
- RtpH264Pay:将H264编码的有效负载转换为RFC 3984格式的RTP数据包
- UDPSink:向网络发送UDP数据包,当rtph264pay数据包与RTP有效负载配对时,就会生成RTP视频流。
这是一种实用性非常高的应用,很多时候部署在边缘端的AIOT计算设备,无法在机器上直接安装显示器去监控现场的状况,这时候用RTSP协议发出视频流,我们可以在其他设备上透过VLC之类的视频播放器,观看边缘设备上的识别结果,过程中可能会有些许的延迟,但总体来说确实非常方便部署的技术。
由于本实验需要用到gst-rtsp-server库,因此需要先进行以下的安装:
|
sudo apt update sudo apt-get install libgstrtspserver-1.0-0 gstreamer1.0-rtsp sudo apt-get install libgirepository1.0-dev sudo apt-get install gobject-introspection gir1.2-gst-rtsp-server-1.0 |
这个项目的输入部分还是使用deepstream-test1的H264视频文件,唯一改变的地方就是输出的方式,也就是在deepstream_test_1.py管道流nvdsosd之前的代码可以不做更动,重点在后面的部分。
在deepstream_test1_rtsp_out.py里面,从第179行(nvdsosd之后)才开始产生变化,这里开始添加一些插件元件:
|
nvvidconv_postosd = Gst.ElementFactory.make("nvvideoconvert", "convertor_postosd") # 创建caps过滤器 caps = Gst.ElementFactory.make("capsfilter", "filter") caps.set_property("caps", Gst.Caps.from_string("video/x-raw(memory:NVMM), format=I420"))
# 根据输入参数选择使用的编码器,预设为H264 if codec == "H264": encoder = Gst.ElementFactory.make("nvv4l2h264enc", "encoder") elif codec == "H265": encoder = Gst.ElementFactory.make("nvv4l2h265enc", "encoder") encoder.set_property('bitrate', bitrate) # 如果是在 Jetson 设备上,执行下面的设定 if is_aarch64(): encoder.set_property('preset-level', 1) encoder.set_property('insert-sps-pps', 1) encoder.set_property('bufapi-version', 1)
# 使有效负载将视频编码为RTP数据包 if codec == "H264": rtppay = Gst.ElementFactory.make("rtph264pay", "rtppay") elif codec == "H265": rtppay = Gst.ElementFactory.make("rtph265pay", "rtppay")
# 建立 UDP 接收器 updsink_port_num = 5400 sink = Gst.ElementFactory.make("udpsink", "udpsink") # 设定接收器的值 sink.set_property('host', '224.224.255.255') sink.set_property('port', updsink_port_num) sink.set_property('async', False) sink.set_property('sync', 1) |
接下去就是按照file-source -> h264-parser -> nvh264-decoder -> nvinfer -> nvvidconv -> nvosd -> nvvidconv_postosd -> caps -> encoder -> rtppay -> udpsink 顺序,将元件依序进行连接。
以上部分的操作逻辑与先前所说的都是一致的,最后只剩一个部分,就是在代码第276~286行,需要调用Gstreamer的gst-rtsp-server库的GstRtspServer对象,细节请自行参考https://github.com/GStreamer/gst-rtsp-server
|
# Start streaming rtsp_port_num = 8554 # 设定端口值
server = GstRtspServer.RTSPServer.new() server.props.service = "%d" % rtsp_port_num server.attach(None)
factory = GstRtspServer.RTSPMediaFactory.new() factory.set_launch( "( udpsrc name=pay0 port=%d buffer-size=524288 caps=\"application/x-rtp, media=video, clock-rate=90000, encoding-name=(string)%s, payload=96 \" )" % (updsink_port_num, codec)) factory.set_shared(True) server.get_mount_points().add_factory("/ds-test", factory) # 设定加载点 |
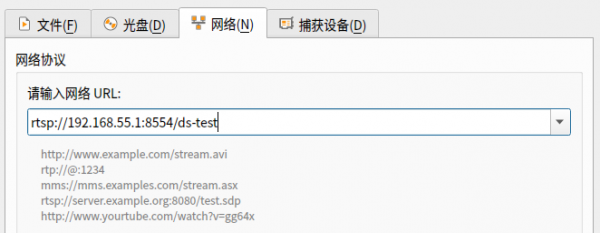
最后面的mount_points设定为“/ds-test”,因此将来在其他设备上要读取RTSP视频流的完整地址就是“rtsp://<IP_OF_DEVICE>:8554/ds-test”,到此就完成将推理计算的结果透过RTSP服务向外推送的工作。
最后关于osd_sink_pad_buffer_probe的部分,与deepstream_test_1.py的内容完全一样,就不重复说明,至于代码最后面有个“def parse_args():”的部分,只是为了解析程式读入的指令参数,很容易就能看懂,这里也不浪费篇幅去讲解。
现在是否可以准备执行这个应用呢?当然是可以的,只不过好像还没有准备好“接收视频”的环境!这个其实也很简单,请找到与本台边缘设备(Jetson Nano 2GB)在相同网段的另一台电脑,可以是Windows、MacOS、Ubuntu操作系统,只要能安装VLC这个播放软件就可以。
假设是使用USB线连接Jetson Nano 2GB与PC的状态,这时在PC上可以透过“192.168.55.1”这个IP访问到Jetson Nano 2GB。现在可以先打开VLC,选择“打开网路串流”后,输入“rtsp://192.168.55.1:8554/ds-test”(如下图)
然后在Jetson Nano 2GB上执行一下指令:
|
# 在DeepStream设备(如Jetson Nano 2GB) cd <DeepStream根目录>/sources/deepstream_python_apps/apps cd deepstream-test1-rtsp-out ln -s ../../../../samples/streams/sample_720p.h264 sample_720.h264 python3 deepstream_test_1_usb.py -i sample_720.h264 |
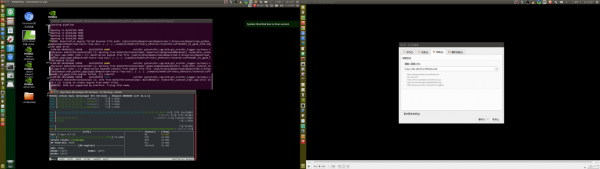
执行前:下图左是用Nomachine连接到Jetson Nano 2GB的显示,下图右是在PC上打开VLC之后的画面。
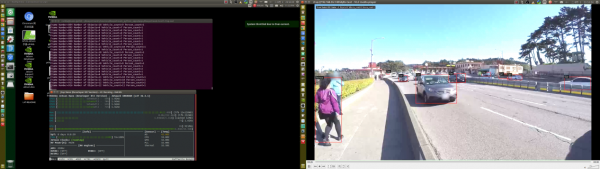
执行后:下图左可以看到Jetson Nano 2GB正在执行推理计算,并且将视频流送出,下图右是在PC的VLC按下“播放”键之后的画面。
这样就完成这个deepstream-test1-rtsp-out的范例,建议大家能多花时间将代码修改的部分好好再咀嚼一番。《完》
来源:业界供稿
好文章,需要你的鼓励

英国NHS无人机快递医疗样本服务正式落地伦敦
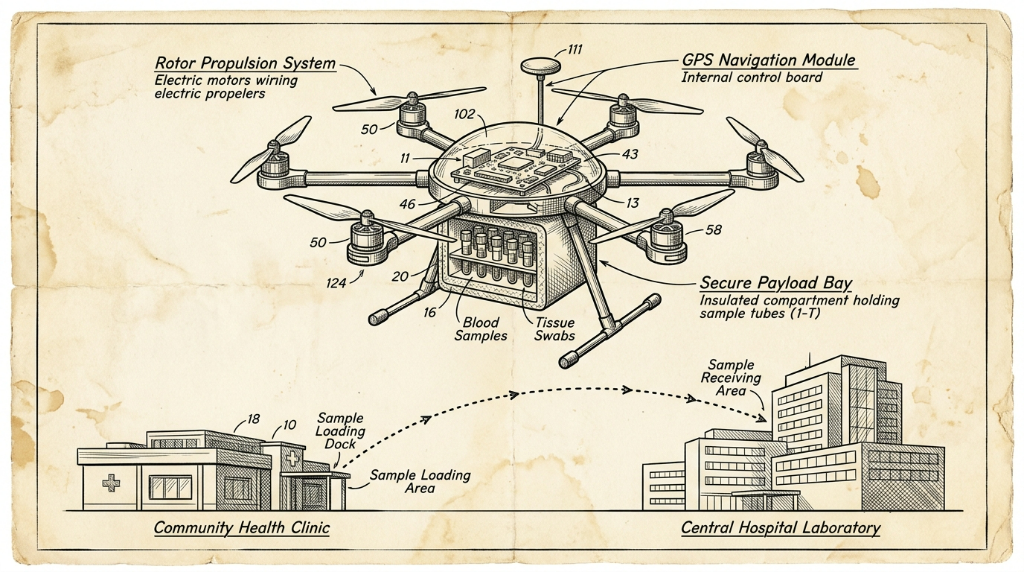
英国国家医疗服务(NHS)正将无人机纳入常规医疗物流体系。自今年2月起,无人机每天在雷恩斯公园和圣乔治医院之间运送血液等诊断样本,飞行仅需3分钟,比公路运输快约85%,且碳排放减少高达98%。目前已有逾2000名患者受益。NHS计划将该服务扩展至圣赫利尔、克罗伊登等多家医院,最终惠及约180万名患者。该网络由英国医疗初创公司Apian与谷歌旗下Wing合作运营。
Explyt团队打造的代码智能体评测新标准:光靠“通过/失败“根本不够用
AgentLens是Explyt公司联合俄罗斯学术机构开发的AI编程助手评测基准,通过分析完整人机交互轨迹而非仅看最终结果,从五个维度评估代码智能体的真实表现。
Aetina宣布支持英伟达Jetson T3000和T2000 AI模块
边缘AI计算厂商Aetina宣布,将在其DeviceEdge AIE-KT风冷系列和新款AIE-PT无风扇平台上支持英伟达全新Jetson T3000和T2000模块。T3000基于Blackwell GPU,最高提供865 FP4 TFLOPS算力,功耗70W;T2000则提供400 FP4 TFLOPS,面向视觉AI代理和自主移动机器人等场景。两款模块预计2027年第一季度上市,支持Nemotron、Cosmos 3等英伟达AI软件生态。
机器人的“触觉觉醒“:韩国梨花女子大学如何让小型AI模型在不忘记视觉的前提下学会“感受“材质
韩国梨花女子大学提出Splash框架,通过识别AI模型中的"休眠参数"并只在其中训练触觉能力,让小型多模态AI在学会感知材质触感的同时,完整保留原有视觉语言推理能力。
2021
11/02
11:36
分享
点赞

WAIC2026 现场直击:开普勒顶流人气王,麒麟系列火爆出圈
面壁智能将密度定律带入具身智能
龙磁科技拟投3.58亿元扩建越南永磁铁氧体基地
首创一层Scale-up网络256卡全互联,摩尔线程MTT C256超节点为万卡及十万卡级集群夯实底座
从高血压诊疗入手,北京安贞医院让医疗大模型走出聊天框
西门子肖松:以场景为牵引,推动工业AI从单点实效迈向生产力跃迁
打造Token极致性价比 新华三震撼亮相2026世界人工智能大会
机器人管家系统上线!傅利叶携多款康养陪伴新品方案亮相WAIC 2026
赛那德“ 自主作业机器人天团” 登陆 WAIC:iLoabot-X+模型双升级,秀出具身场景落地硬实力
西门子Eigen工程智能体中国首发首展,荣获2026 WAIC SAIL之星奖
NVIDIA Cosmos 推动物理 AI 前沿发展
PPIO亮相WAIC 2026:发布智能模型网关,打造面向Agent时代的智能Token工厂
