
NVIDIA Jetson Nano 2GB 系列文章(8):执行常见机器视觉应用
在本系列上一篇文章中,我们为大家展示了如何通过 OpenCV 调用 CSI/USB 摄像头,在本篇文章中,我们将向大家介绍如何执行常见机器视觉应用。
在上一篇文章中,已经简单说明了图像处理与计算机视觉的差异,并且在 Jetson Nano 2GB 上,结合 CSI 摄像头与 JetPack 所提供的 OpenCV 4.1.1 版本,实现了三种最基础的应用。每个 Python 代码都只需要 10+ 行就可以,让大家轻松感受到 Jetson Nano 2GB 的开发便利性。
本篇内容主要是在 Jetson Nano 2GB 上运用 OpenCV,执行三个有特色的计算机视觉应用,这部分会很频繁的运用到色彩空间(color space)转换技巧,在 OpenCV 上只需要一道“cv2.cvtColor()”指令就可以实现,非常简单。
接下来就开始本文的实验内容。
追踪特定颜色物件
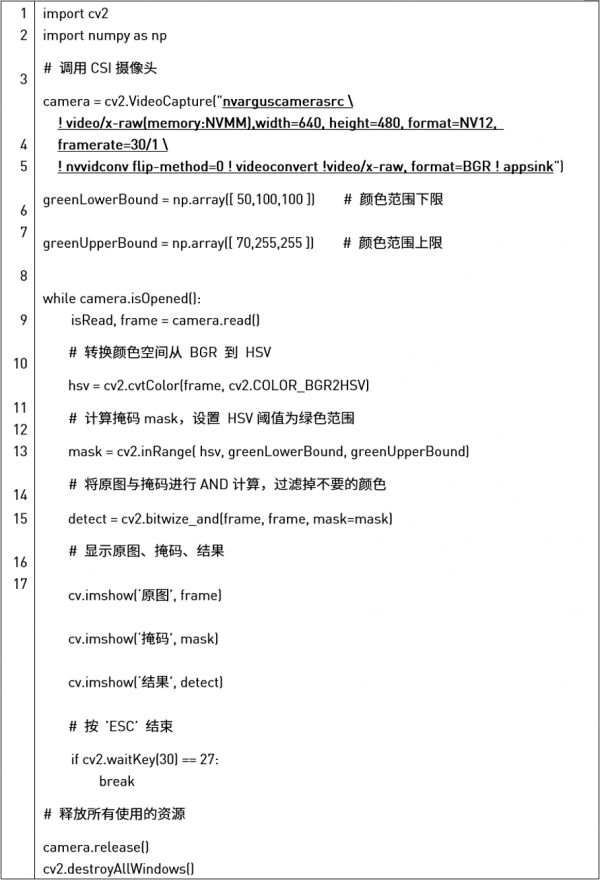
本范例追踪“绿色”物体,执行步骤如下:
-
先找出“绿色”的 HSV 颜色范围,本处定在[50,100,100]至[70,255,255]
-
将读入的图像(frame)透过 cv2.cvtColor() 转成 HSV 格式,存到 hsv 变量
-
用 cv2.inRange() 函数找出 hsv 的掩码,存到 mask 变量
-
用 cv2.bitwize_and() 函数将 frame 与 mask 进行 AND 计算,过滤掉“非绿”部分,将结果存到 detect 变量
-
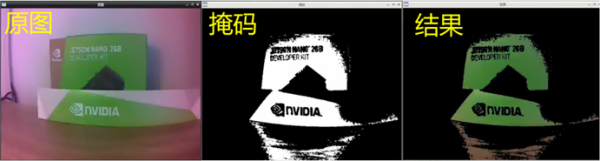
将原图(frame)、掩码(mask)与结果(detect) 显示在画面上
执行结果如下:
边缘检测(Edge Detection)
执行步骤如下:
-
这个计算必须将图像转成灰度图像,才能计算出每个物件的边缘线条
-
将读入的图像(frame)透过 cv2.cvtColor 转成 HSV 灰度图像,存到 hsv 变量
-
为了降低图形的噪点,因此需要将 HSV 灰度图进行高斯模糊(降噪)处理,直接调用 cv2.GaussianBlur() 函数进行转换,将图像存到 blur 变量中
-
最后调用 cv2.Canny() 函数为 blur 图像找出边际线条,存入 edges 变量中
-
为了显示过着中所有图像,因此先将每张图像都调整尺寸为(640,480),然后执行三次 np.concatenate() 函数,将四张图像集成为一张,便于显示。

执行结果如下:

人脸追踪+眼睛追踪
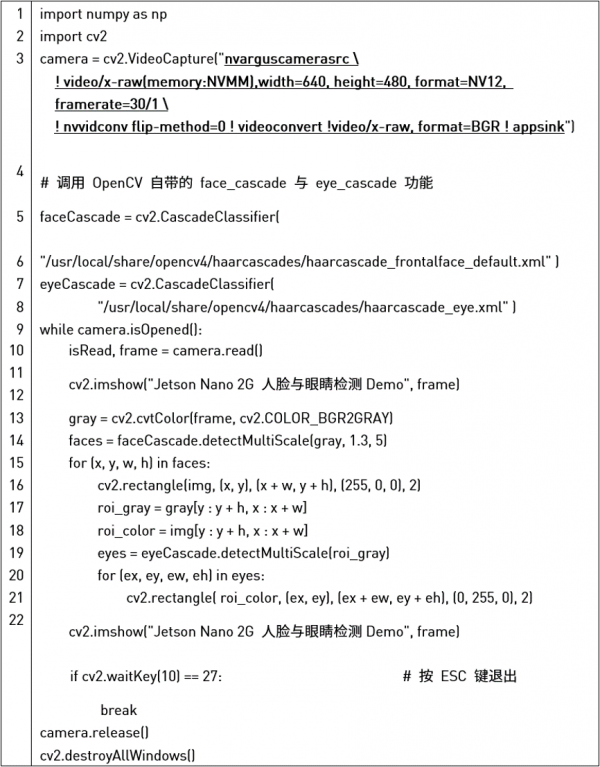
这个代码调用 OpenCV 自带的 HaarCascade 算法分类器,调用方式也很简单,需要指定脸部分类器(classifier)的位置,在 /usr/local/share/opencv4/haarcascades 下面,里面提供将近 20 种分类器,可以按照需求变更。
这个范例也将“眼睛”识别分类器放进去,并且嵌套在脸部识别的循环里面,因为眼睛一定在脸里面,这样可以做的更丰富些。
详细代码如下:
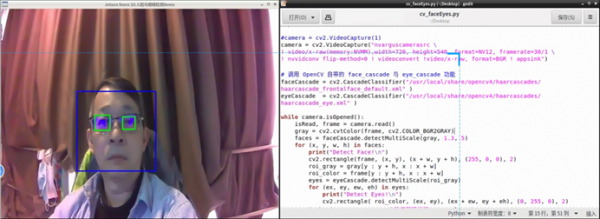
执行结果如下:蓝色框代表找到的“脸”,绿色框表示“眼睛”。
来源:英伟达
好文章,需要你的鼓励



让AI记住房间每个角落:悉尼大学团队如何让视频生成拥有“空间记忆“
悉尼大学和微软研究院联合团队开发出名为Spatia的创新视频生成系统,通过维护3D点云"空间记忆"解决了AI视频生成中的长期一致性难题。该系统采用动静分离机制,将静态场景保存为持久记忆,同时生成动态内容,支持精确相机控制和交互式3D编辑,在多项基准测试中表现优异。

西班牙病毒如何将谷歌带到马拉加
33年后,贝尔纳多·金特罗决定寻找改变他人生的那个人——创造马拉加病毒的匿名程序员。这个相对无害的病毒激发了金特罗对网络安全的热情,促使他创立了VirusTotal公司,该公司于2012年被谷歌收购。这次收购将谷歌的欧洲网络安全中心带到了马拉加,使这座西班牙城市转变为科技中心。通过深入研究病毒代码和媒体寻人,金特罗最终发现病毒创造者是已故的安东尼奥·恩里克·阿斯托尔加。

马里兰大学突破性发现:AI推理过程终于有了“身体检查“——ThinkARM框架揭开大型语言模型思维奥秘
马里兰大学研究团队开发ThinkARM框架,首次系统分析AI推理过程。通过将思维分解为八种模式,发现AI存在三阶段推理节律,推理型与传统AI思维模式差异显著。研究揭示探索模式与正确性关联,不同效率优化方法对思维结构影响各异。这为AI系统诊断、改进提供新工具。
2021
03/17
17:00
分享
点赞

生命科学计算测试专委会正式成立,BioProfile框架引领行业标准建设
超智算完成北京核心智算中心资产收购,加速构筑“3+X”全国算力网络新格局
走出“参数崇拜”:联想用“一体多端”重塑“人的尺度”
从“单点突破”到“一体多端”:拆解天禧AI 3.5进化背后三年的进化哲学
openGauss Summit 2025在京召开,加速行业智能化变革,共建繁荣数据库生态
2025联想天禧AI生态伙伴大会:天禧AI一体多端,与开发者共建个人AI生态
西班牙病毒如何将谷歌带到马拉加
LangChain核心库曝出严重漏洞,AI智能体机密信息面临泄露风险
Mill如何与亚马逊和全食超市达成合作协议
TechCrunch创业大赛中的9家顶尖生物技术初创公司
2025年印度科技领域十大重要发展
中科大发布Live Avatar:AI数字人无限聊天不翻车
NVIDIA Blackwell 现已在云端全面可用
为“代理式AI”装上“护栏” NVIDIA打造“三重防线”
黄仁勋现身北京致辞:60年后,计算机正被重新定义
CES 2025 | NVIDIA Isaac GR00T Blueprint 让人形机器人“加速进化”
未来,就在我们手中
CES 2025 | 代理式AI崛起:NVIDIA定义下一代“代理式 AI Blueprint”
深度学习最佳 GPU,知多少?
NVIDIA推出用于多语言生成式人工智能的NeMo Retriever微服务
NVIDIA 初创加速计划 | 2024 NVIDIA 创业企业展示完美收官!
老黄掏出“迷你版AI超算”,每秒67万亿次运算,仅售2070元人民币
