
对图像传感器的认识误区:传感器类型
作者: 安森美智能感知事业部Geoff Ballew
如今,摄像头已随处可见,工厂、车辆、公共建筑、街道……其数量还在不断增多。大部分摄像头依靠图像传感器将场景中的光线转换为电子图像,因而推升了对图像传感器的需求。但图像传感器种类繁多,功能特性各不相同,设计人员需要熟悉不同传感器的不同功能特性,才能为特定应用选择合适的摄像头。
乘用车摄像头搭载量激增,有些豪华车型甚至配有十几个摄像头。汽车制造商需要添加更多传感器以提升安全性,还需考虑每个摄像头的经济成本和占用空间,这为其带来了挑战。于是,汽车制造商开始寻找解决方案,希望用一个摄像头捕获同时针对人眼视觉和机器视觉优化的图像。人眼视觉与机器视觉所适用的图像质量存在区别,需要权衡取舍,因此实施这一方法同样难度不小。
人眼视觉
人眼视觉系统对像素间亮度强弱差异的感知与机器视觉算法不同。人眼对亮度的感知是非线性的,也就是说,如果所在环境中光子数量增加一倍,眼睛感知到的亮度也只增加了一倍。这需要调整用于人眼视觉的摄像头图像以对应其动态范围,从而将人眼感知的较亮区域和较暗区域的细节充分放大。此外,我们对一般颜色和 LED 光源的闪烁十分敏感(这一问题日益普遍),因此如果摄像头导致颜色失真,即使图像清晰且其他方面的质量很高,也会影响人类的视觉体验。对于后视摄像头等辅助驾驶的被动安全系统,驾驶员也比机器视觉系统有优势,因为如果图像有缺,驾驶员会自动发现,而此时无需依赖摄像头。虽然这不会引发重大安全事故,但摄像头丧失用处也会带来不便,因此,驾驶员不会依赖摄像头图像,而是更多地进行主动判断。
机器视觉
与人眼视觉不同,使用机器视觉的自动化系统会查看图像中每个像素的数字值,因此其对光子数呈线性反应。与用于人眼视觉的图像不同,因此必须调整以输出对应于测量像素值的图像。此外,机器视觉系统必须经过编程或采用特殊的错误检测硬件才能检测出图像缺陷。缺少该硬件的系统可能无法正常工作,且不会告知驾驶员其功能已受损或无法运行。对于像自动紧急制动这样的主动安全系统,如果出现故障,误报将导致系统在无碰撞危险时实施制动,而漏报会使系统在发生危险时完全失灵,从而造成严重的后果。如果驾驶员使用此类辅助系统,则需要显示信息来指示其功能不全,但可能无法发出功能受损的警告。部分系统会提醒驾驶员其功能受损或“不可用”,它们通常依赖特殊的硬件功能来检测传感器中的错误或故障。此类功能须遵循汽车安全完整性等级 (ASIL) 等相关的行业标准,支持 ASIL 的传感器将具有检测和报告故障的功能,可提高安全性。以上就是用于机器视觉的传感器与用于人眼视觉的传感器需要进行不同配置的两个原因。
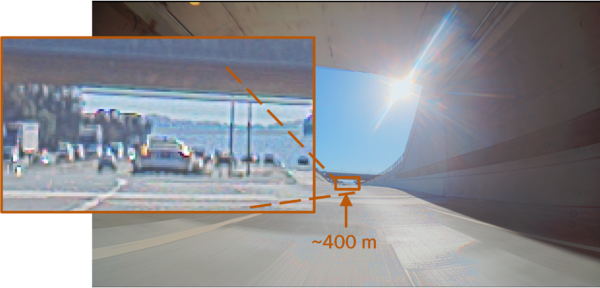
120 度视场传感器 RYYCy 图像,经过彩色处理
使用单个摄像头实现观察和感知的传感器解决方案
好消息是,部分传感器已具备同时适用于人眼和机器视觉的出色功能,且可进行优化并输出两路同步数据流,助力工程师设计可同时用于人眼和机器视觉功能的摄像头系统。这样一来,汽车制造商只需在车内的特定位置部署一个摄像头,最大限度地减小占用空间并降低系统成本,获得可针对两种工作负载应用优化的图像。
来源:业界供稿
好文章,需要你的鼓励


用谷歌街景模拟真实世界场景,Project Genie 全面升级
谷歌发布Project Genie新功能,将其世界生成模型与Google街景视图相结合,使AI智能体能够在基于真实地点的虚拟环境中导航与交互。用户可选择美国任意地点,结合"沙漠""石器时代"等风格,生成富有创意的沉浸式世界。该功能目前已向全球符合条件的Google AI Ultra订阅用户(200美元/月)逐步开放,未来计划扩展至更多地区。

新加坡国立大学发布首个视频“潜台词“理解基准测试:AI究竟能不能读懂视频背后的弦外之音?
新加坡国立大学构建了首个视频隐喻理解基准ViMU,含588段视频与2352道题,测试16个主流AI模型均未超过50%,揭示AI在视频潜台词理解上的系统性短板。

保加利亚启用谷歌云强化国家网络安全防御
保加利亚国家系统集成商BIS已部署谷歌云Cybershield服务,成为欧洲首批落地该方案的国家之一。项目获欧盟资金支持,旨在整合网络情报与遥测数据,覆盖54个政府及公共部门实体,将威胁检测与响应从被动转为主动。BIS将借助谷歌云安全运营平台及Mandiant威胁情报,构建联邦化跨机构安全运营中心,以AI驱动的防御能力应对日益复杂的网络威胁。

浙江大学联合多所顶校:让AI真正“看懂“360度全景图,机器人导航和视觉搜索迎来新突破
浙江大学等机构联合提出PanoWorld,通过球面空间交叉注意力和57万张全景图训练数据,让AI能直接理解360度全景图的空间结构,在导航和视觉搜索任务中大幅超越现有方法。

