
对图像传感器的认识误区:传感器类型
作者: 安森美智能感知事业部Geoff Ballew
如今,摄像头已随处可见,工厂、车辆、公共建筑、街道……其数量还在不断增多。大部分摄像头依靠图像传感器将场景中的光线转换为电子图像,因而推升了对图像传感器的需求。但图像传感器种类繁多,功能特性各不相同,设计人员需要熟悉不同传感器的不同功能特性,才能为特定应用选择合适的摄像头。
乘用车摄像头搭载量激增,有些豪华车型甚至配有十几个摄像头。汽车制造商需要添加更多传感器以提升安全性,还需考虑每个摄像头的经济成本和占用空间,这为其带来了挑战。于是,汽车制造商开始寻找解决方案,希望用一个摄像头捕获同时针对人眼视觉和机器视觉优化的图像。人眼视觉与机器视觉所适用的图像质量存在区别,需要权衡取舍,因此实施这一方法同样难度不小。
人眼视觉
人眼视觉系统对像素间亮度强弱差异的感知与机器视觉算法不同。人眼对亮度的感知是非线性的,也就是说,如果所在环境中光子数量增加一倍,眼睛感知到的亮度也只增加了一倍。这需要调整用于人眼视觉的摄像头图像以对应其动态范围,从而将人眼感知的较亮区域和较暗区域的细节充分放大。此外,我们对一般颜色和 LED 光源的闪烁十分敏感(这一问题日益普遍),因此如果摄像头导致颜色失真,即使图像清晰且其他方面的质量很高,也会影响人类的视觉体验。对于后视摄像头等辅助驾驶的被动安全系统,驾驶员也比机器视觉系统有优势,因为如果图像有缺,驾驶员会自动发现,而此时无需依赖摄像头。虽然这不会引发重大安全事故,但摄像头丧失用处也会带来不便,因此,驾驶员不会依赖摄像头图像,而是更多地进行主动判断。
机器视觉
与人眼视觉不同,使用机器视觉的自动化系统会查看图像中每个像素的数字值,因此其对光子数呈线性反应。与用于人眼视觉的图像不同,因此必须调整以输出对应于测量像素值的图像。此外,机器视觉系统必须经过编程或采用特殊的错误检测硬件才能检测出图像缺陷。缺少该硬件的系统可能无法正常工作,且不会告知驾驶员其功能已受损或无法运行。对于像自动紧急制动这样的主动安全系统,如果出现故障,误报将导致系统在无碰撞危险时实施制动,而漏报会使系统在发生危险时完全失灵,从而造成严重的后果。如果驾驶员使用此类辅助系统,则需要显示信息来指示其功能不全,但可能无法发出功能受损的警告。部分系统会提醒驾驶员其功能受损或“不可用”,它们通常依赖特殊的硬件功能来检测传感器中的错误或故障。此类功能须遵循汽车安全完整性等级 (ASIL) 等相关的行业标准,支持 ASIL 的传感器将具有检测和报告故障的功能,可提高安全性。以上就是用于机器视觉的传感器与用于人眼视觉的传感器需要进行不同配置的两个原因。
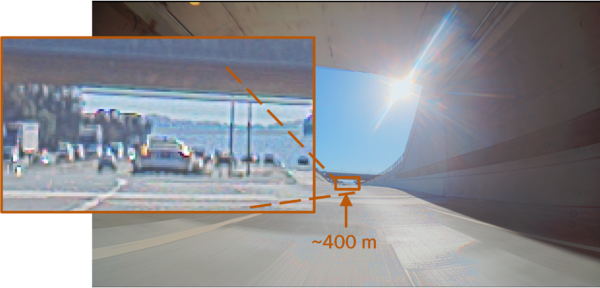
120 度视场传感器 RYYCy 图像,经过彩色处理
使用单个摄像头实现观察和感知的传感器解决方案
好消息是,部分传感器已具备同时适用于人眼和机器视觉的出色功能,且可进行优化并输出两路同步数据流,助力工程师设计可同时用于人眼和机器视觉功能的摄像头系统。这样一来,汽车制造商只需在车内的特定位置部署一个摄像头,最大限度地减小占用空间并降低系统成本,获得可针对两种工作负载应用优化的图像。
来源:业界供稿
好文章,需要你的鼓励


Uber年度遗失物报告揭示:数千件物品遗留在无人驾驶出租车中
Uber年度失物报告首次纳入无人驾驶出租车数据。过去一年,乘客在Uber平台的机器人出租车中遗留了数千件物品,包括手机、钥匙、钱包等常见物品,以及假牙、15磅溜溜球等奇特物件。乘客可通过App联系客服找回失物,支付15美元即可享受同城配送,或前往车辆停放站自取。Uber表示,将依托现有运营体系为自动驾驶业务提供全面支持,计划2025年底前在全球15座城市开通无人驾驶打车服务。

NVIDIA推出“三模式“AI语言大脑:一个模型同时兼顾速度与准确,彻底打破现有推理瓶颈
英伟达推出Nemotron-Labs-Diffusion三模式语言模型,将逐字生成、并行扩散与自猜自验融于一体,单用户吞吐量最高达Qwen3-8B的4倍,同时保持相近准确率。

Uber今年将部署500辆数据采集车辆,助力自动驾驶发展
Uber周三发布了一款基于现代Ioniq 5改装的数据采集原型车,搭载14个摄像头、8个固态激光雷达和9个雷达,通过英伟达双驱Thor计算机处理数据。Uber计划今年在全球部署500辆此类车辆,每月可采集200万英里高保真驾驶数据,供Avride、Waymo、WeRide等30余家自动驾驶合作伙伴使用。这是Uber自2020年出售自动驾驶部门以来首次自主组装车辆,也是其AV Labs部门的重要进展。

华东师范大学等多家机构联合出手:让机器人训练数据“少而精“,原来靠这个秘密武器
SIEVE是一种面向机器人模仿学习的数据筛选方法,通过发现可复用行为原语和转换接口,用50%数据和训练量超越全量训练效果。
2023
06/19
17:12
分享
点赞

Uber今年将部署500辆数据采集车辆,助力自动驾驶发展
Uber、Wayve与Waymo的伦敦无人驾驶出租车大战即将开启
Mobileye计划2027年在美国推出自动驾驶出租车服务
Waymo召回近4000辆无人出租车,原因是其进入高速公路施工区域
特斯拉在奥斯汀开始测试无方向盘无踏板Cybercab量产版
图灵奖得主Patterson:摩尔定律的真相,CPU、GPU、TPU的诞生与分工
Omdia报告:Dell PowerProtect助力企业三年期网络弹性TCO最高降低61%
“驯服”千亿模型,鏖战“黑猴打瓦”,龙虾“一键接管” ,锐龙AI Max+ 395开启全能桌面AI主机“王炸”时刻
豪声电子泰国电声工厂初步投产:2500万泰铢项目进入产能爬坡
地瓜机器人将560TOPS端侧算力,加载到了20+头部团队机器人中
WAIC 2026主论坛(下午场)重磅揭晓!
AI评测初创公司Braintrust遭入侵,敦促所有客户轮换API密钥
