
Orin开发套件02-配置操作系统
英伟达为Orin开发套件提供更加轻松的系统安装方式,下图提供两种操作流程:
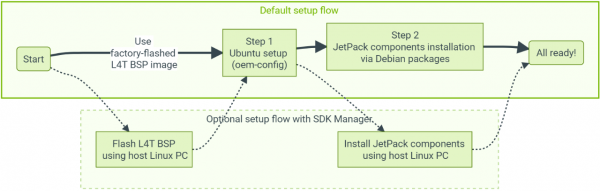
- 上方路径:直接使用工厂出货时预安装的L4T BSP Image镜像;
- 下方路径:用PC上的SDK Manager进行操作系统刷机(flash)的动作。
现在先为Orin装上鼠标、键盘以及DP(Display Port)接口显示器就能使用,如果您手边没有直接的DP显示器的话,使用部分品牌的DP to VGA转接头也是可以,目前测试过DP to HDMI转接方式是有问题的。
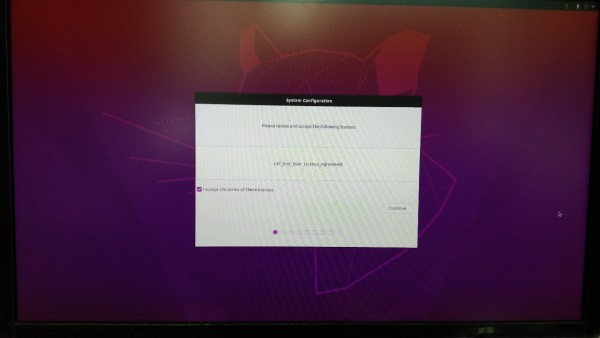
开机之后就进入上图“Step 1. Ubuntu setup(oem-config)”阶段,进行以下9个步骤的系统配置工作:
- 同意授权:点选左下角“I accept the terms of thses licences”左边的框,然后点击右下角“Continue”按钮进行下一步;
- 选择“语言”种类:建议这个阶段先不要选择中文,直接点击右下角“Continue”按钮进行下一步;

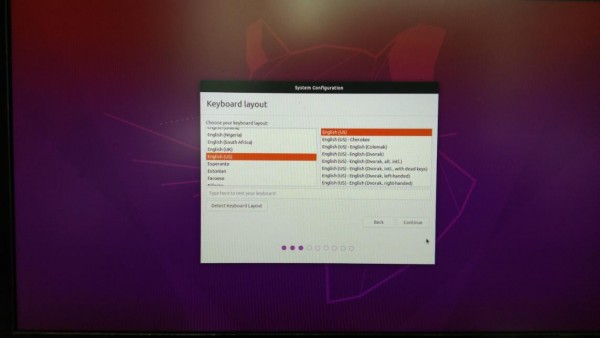
- 选择“键盘布局”:直接点击右下角“Continue”按钮进行下一步;
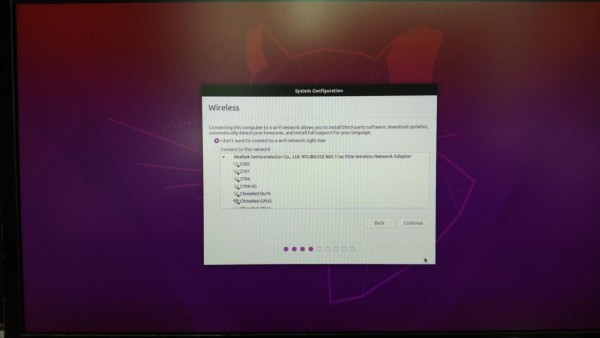
- 连接WIFI无线热点:可以根据您的实际状况选择热点,或者现在先不连接,等后面进系统之后在连接,然后点击右下角“Continue”进行下一步;
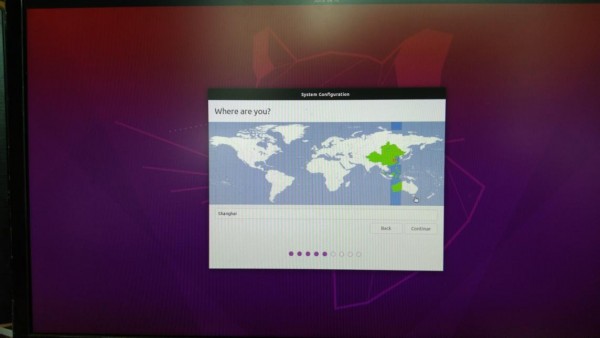
- 选择“区域”:用鼠标点击图里“中国”范围,下面地区会更新为“Shanghai”,然后点击右下角“Continue”进行下一步;
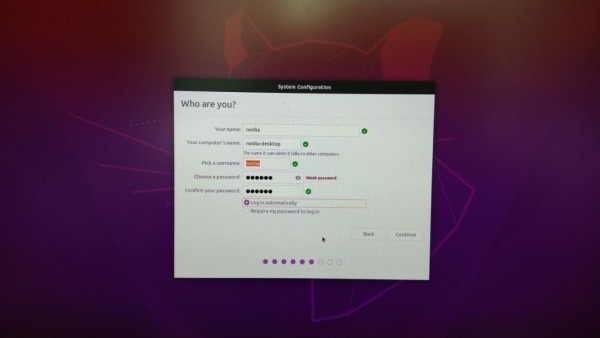
- 配置用户名与密码:这个步骤算得上是最重要的环节,因为没有预设值,因此包含用户名(Your Name)、设备名称(Your computer’s name)、密码(Choose a password)都需要自行输入,然后点击右下角“Continue”进行下一步;
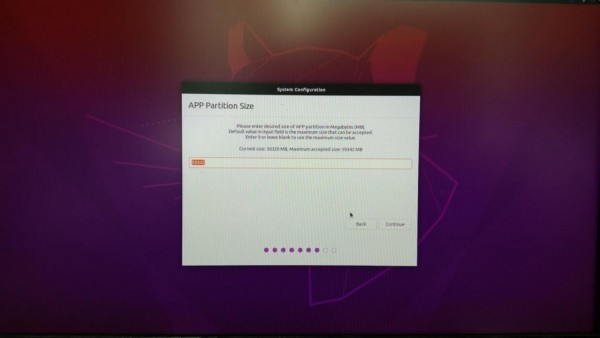
- 配置使用的磁盘空间:预设为最大可用空间,建议不做修改,然后点击右下角“Continue”进行下一步;
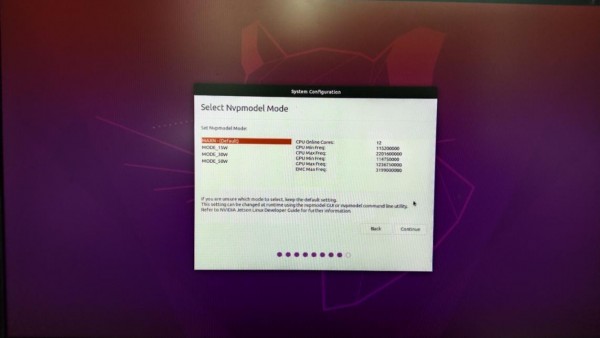
- 选择工作(功耗)模式:这个部分在后面使用时很容易切换,因此这里也接受预设值(MAXN-Default)就行,然后点击右下角“Continue”进行下一步;
- 是否安装Chromium浏览器:接受预设值(安装),然后点击右下角“Continue”进行下一步;

接下去系统就会根据前面的选择,执行“System configuration”,如下面两张图所示的步骤。

执行完系统配置之后,就会自动重启,然后进入Ubuntu 20.04 L4T(Linux for Tegra)桌面级操作系统,如同所有Ubuntu操作系统第一次登录时需要执行的步骤一样,都选择“Next”就可以,然后就会看到下面这个熟悉的Ubuntu标准桌面。
这样就完成操作系统的配置,不过到目前为主,还未安装相关的开发环境,包括CUDA工具包、CUDNN/TensorRT库、OpenCV视觉库等等,因此下个步骤就是要为Orin开发套件安装完整的开发环境。【完】
来源:业界供稿
好文章,需要你的鼓励


Decart发布Oasis 3世界模型,为机器人训练注入真实感
前沿AI研究机构Decart发布最新世界模型Oasis 3,旨在弥合虚拟仿真与物理AI之间的鸿沟。该模型将超写实交互图形能力与强大物理引擎相结合,可生成动作驱动的视频流,支持多视角环境模拟,延迟低于200毫秒。开发者能够借助自然语言提示,快速构建多样化极端场景,有效解决机器人和自动驾驶领域长期存在的"仿真到现实"差距问题,大幅降低物理AI训练成本。

当AI学会“自学成才“:无需人类喂养的智能代理如何在真实世界中越战越强——来自理海大学等机构的最新突破
OpenSkill是一套让AI代理无需人工监督即可自主成长的框架,通过从互联网获取知识、自建虚拟考题反复练习,实现真正的开放世界自我演化。

Visual Components 5.1发布:工厂仿真软件新版本支持大规模自主生产环境验证
Visual Components正式发布5.1版本工厂仿真软件,重点引入高精度物理仿真与可扩展机器人协同调度能力,支持在同一环境中同时模拟数百台自主移动机器人、自动导引车及人员的运行状态。新版本还将仿真性能提升至前代的10倍,新增Allen-Bradley PLC支持及Nachi、Epson机器人虚拟调试插件,并将脚本环境升级至Python 3。该软件旨在帮助制造商在实际部署前完成系统验证,降低调试风险,缩短投产周期。

当AI评委同时打多份分时,它的判断力会崩溃吗?——来自IIT焦特布尔与亚马逊的联合研究
论文研究了AI评委同时优化多个评判维度时的两大失败原因:梯度稀释与指令干扰,为多目标提示词优化提供了系统性诊断框架。
2022
07/13
15:34
分享
点赞

Decart发布Oasis 3世界模型,为机器人训练注入真实感
AI既令人兴奋又让人焦虑,企业究竟该如何面对?
芬兰与瑞典联手推进6G韧性联合研究计划
微软公布智能体AI系统七大新型安全漏洞
GitHub Copilot推出桌面应用与画布功能,同步启用按量计费模式
谷歌DeepMind分拆公司如何追踪隐藏的药物靶点
Snowflake峰会观察:智能体浪潮下平台的核心竞争力之争
亚马逊"故事回顾"功能正式向美国Kindle设备及iPhone应用推出
Anthropic推出聚焦生命科学的全新大语言模型
Motive AI Coach智能驾驶辅导系统正式进军英国市场
联想世界杯嘉年华盛大启幕!AI+体育引领中国足球产业升级
Google Cloud深度解析AI智能体治理难题
NVIDIA Blackwell 现已在云端全面可用
为“代理式AI”装上“护栏” NVIDIA打造“三重防线”
黄仁勋现身北京致辞:60年后,计算机正被重新定义
CES 2025 | NVIDIA Isaac GR00T Blueprint 让人形机器人“加速进化”
未来,就在我们手中
CES 2025 | 代理式AI崛起:NVIDIA定义下一代“代理式 AI Blueprint”
深度学习最佳 GPU,知多少?
NVIDIA推出用于多语言生成式人工智能的NeMo Retriever微服务
NVIDIA 初创加速计划 | 2024 NVIDIA 创业企业展示完美收官!
老黄掏出“迷你版AI超算”,每秒67万亿次运算,仅售2070元人民币
