
NVIDIA Jetson Nano 2GB 系列文章(7):通过 OpenCV 调用 CSI/USB 摄像头
在本系列上一篇文章里,我们为大家介绍了 Jetson Nano 2GB 安装 CSI 摄像头的方法,以及最基础的启动指令。在本篇文章中,我们将向大家展示如何通过 OpenCV 调用 CSI/USB 摄像头。
本期我们会带着大家使用这个摄像头,执行一些很实用的图像处理(image processing)应用,至于计算机视觉(computer vision)的应用,将在下一期里带着大家一起操作。
什么是图像处理?什么又是计算机视觉?如果您有所混淆的话,这里先做个基本说明,二者之间的区隔还是很明显的:
图像处理:输入为图像,输出也是图像
过程中对于图形进行一些应用处理,例如颜色空间(color space)转换、图像格式转换、尺寸转换、角度转换、图像合成等操作,最基本的就是将摄像头的图像读入,显示在屏幕上,并写入磁盘,这就形成一个最简单的录像功能。
计算机视觉:输入为图像,输出为信息
在输入的图像/视频中,找到特定信息的技术,例如基于颜色的追踪、物体边缘的检测、将图像的像素转成信号直方图(histogram)等计算,甚至于车道查找(lane finding)、人脸检测(face detection)等,都属于计算机视觉的范畴,其输入为一张图像,但输出的是某类从图像中淬炼出来的信息。
在 Jetson Nano 2GB 搭建的 JetPack 4.4.1 版本里,内建 OpenCV 4.1.1 版本的开发环境,这是目前图像处理、计算机视觉领域使用率最高的开发工具,因此我们就用 OpenCV 搭配 CSI 摄像头来做图像处理项目。
这里使用 Jetson Nano 2GB 的自带的 gedit 全文编辑器来撰写代码,编程语言使用 Jetson Nano 2GB 预安装的 Python 3.6 版本,由于相关所需的开发环境都已经由 JetPack 4.4.1 完整提供,因此不需要再执行额外的安装,非常简便。
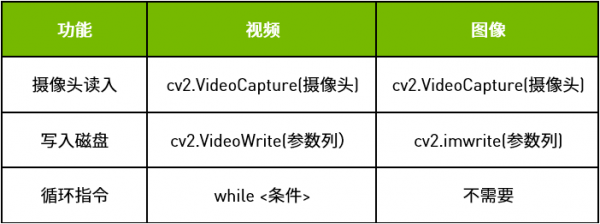
我们可以将视频数据认知为由连续的图像所组合,因此在这里全部以视频处理作为示范,比较动态。至于图像的处理方式,请自行调整代码,二者之间的差异主要在写入磁盘以及是否需要循环指令的部分,如下表:
实现摄像头录像功能
这个功能主要执行三个动作:
-
从摄像头读入图像
-
给定文件名
-
写入磁盘中
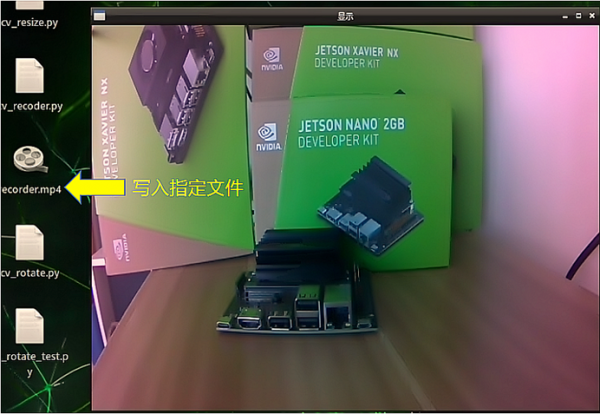
这些动作在 OpenCV 都有非常简单的对应指令可以操作,详细代码如下:
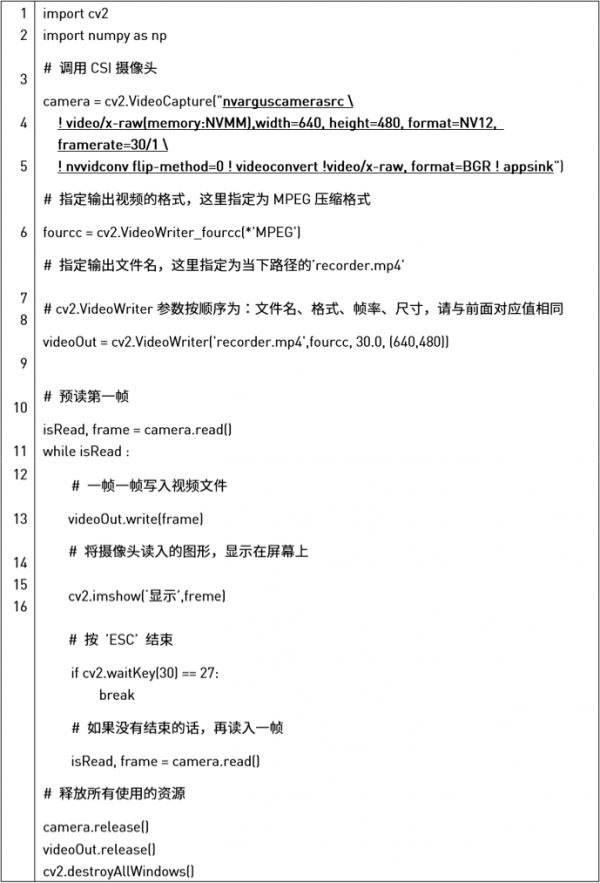
本代码以“ESC”键结束录像。
将读入的图像执行缩放
这个功能主要执行三个动作:
-
摄像头读入图像
-
调用 cv2.resize 函数进行图像尺寸改变,选择插值方式(cv2.INTER_NEAREST)
-
在屏幕上显示
完整代码如下:
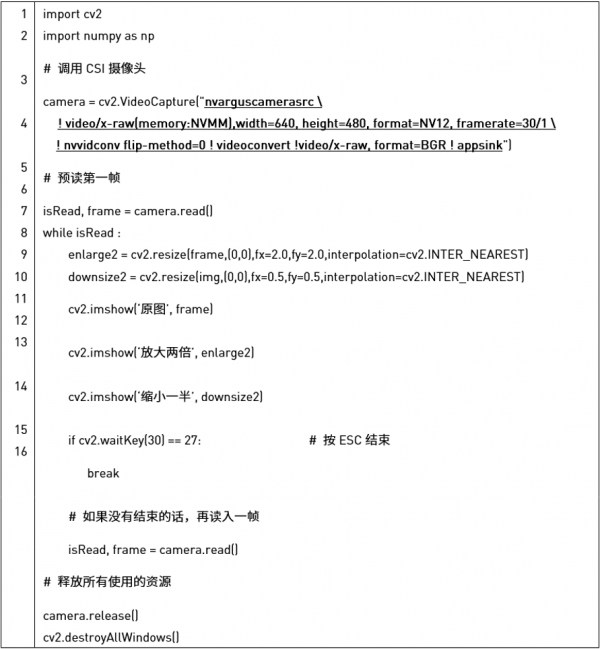
本代码以“ESC”键结束录像。

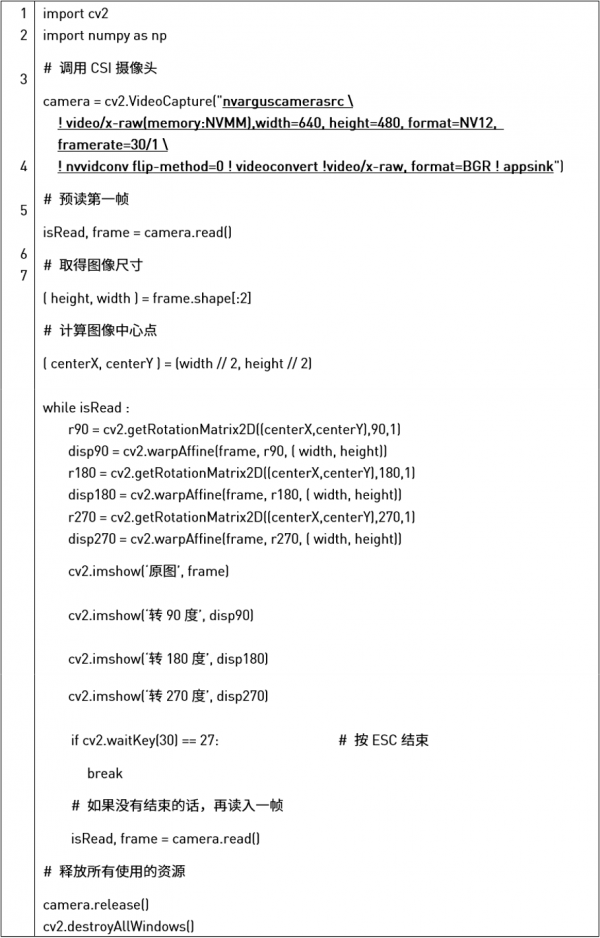
将读入的图像执行旋转
这个功能主要执行 4 个动作:
-
从摄像头读入图像
-
找出图像中心点
-
调用 cv2.getRotationMatrix2D() 函数进行旋转
-
显示:本范例显示 90 度/ 180 度/ 270 度
详细代码如下:
本代码以“ESC”键结束录像。

本文介绍了 3 种在 Jetson Nano 2GB 上,结合 CSI 摄像头与 OpenCV 做的很实用的图像处理应用,应该很容易上手。后面将为您介绍几个常用的计算机视觉应用情况。
来源:英伟达
好文章,需要你的鼓励


Decagon:让企业重掌客户关系主导权
多家企业通过Decagon的AI客服平台实现了显著成效:一家财富50强企业在三周内完成了九个月未竟的工作;一家航空公司从启动到全面上线仅用三周;一家音乐流媒体平台六个工作日即投入生产,AI处理率达71%。Decagon以"玻璃盒"而非"黑盒"理念构建,通过AOPs和Duet工具赋能企业运营者自主部署和迭代AI客服,真正将客户关系的主导权还给企业本身。

东南大学、南京大学、微软研究院联手打造:让机器人真正“看懂世界、动起来“的统一推理引擎
东南大学等机构联合推出Embodied.cpp,一个面向机器人AI的C++统一推理运行时,首次同时支持VLA和WAM两类模型的边缘部署与闭环控制。

2026年Q2芯片与AI硬件创投融资全景报告
2026年第二季度,AI硬件、量子计算及芯片制造领域融资持续火热。边缘AI芯片时隔多年重获投资者青睐,量子计算领域有21家公司完成融资,其中6家超亿美元。本季度共18家企业融资超1亿美元,涵盖SiFive(4亿美元)、Etched(5亿美元)、Nearfield Instruments(3.8亿美元)等重磅融资,日本Rapidus获政府补贴约9.43亿美元,80家企业合计融资逾60亿美元。

加州大学伯克利与多伦多大学联手破解:为什么“老方法“在高维数据搜索中反而越来越好用?
这项多校联合研究系统评测了多探针网格近似最近邻搜索算法,发现其在高维数据上的性能退化明显弱于主流方法,且建索引速度快约百倍,在高频重建场景下具有竞争力。
2021
03/17
16:56
分享
点赞

2026年Q2芯片与AI硬件创投融资全景报告
Reed Jobs专注癌症攻克,用AI与风投重塑肿瘤学研究
自动化如何从五个方面消除发货环节的错误
意法半导体入股人形机器人开发商Oversonic Robotics
ChatGPT 桌面版惨遭"肢解":截图与协作功能全部消失
从前沿创新到产业落地:西门子将亮相2026世界人工智能大会
维科精密泰国汽车电子工厂承接博世海外新订单,2026年多项定点项目落地
Robot.com发布人形机器人R-noid,专为高流失率岗位而生
Mac Studio 打得过 RTX 5090 吗?本地AI硬件的赢家不是更快的那个
美国联邦机构要求自动驾驶车企停止妨碍紧急救援行动
诺兰:AI无法取代人类创造力,"替代人类"之说是无稽之谈
大疆无人机如何革新雪崩救援行动
NVIDIA Blackwell 现已在云端全面可用
为“代理式AI”装上“护栏” NVIDIA打造“三重防线”
黄仁勋现身北京致辞:60年后,计算机正被重新定义
CES 2025 | NVIDIA Isaac GR00T Blueprint 让人形机器人“加速进化”
未来,就在我们手中
CES 2025 | 代理式AI崛起:NVIDIA定义下一代“代理式 AI Blueprint”
深度学习最佳 GPU,知多少?
NVIDIA推出用于多语言生成式人工智能的NeMo Retriever微服务
NVIDIA 初创加速计划 | 2024 NVIDIA 创业企业展示完美收官!
老黄掏出“迷你版AI超算”,每秒67万亿次运算,仅售2070元人民币
