
NVIDIA Jetson Nano 2GB 系列文章(6):安装与调用摄像头
在本系列上一篇文章里,我们带领大家体验了视觉功能库。在本篇文章中,我们将带领大家安装与调用摄像头。
不管是 AI 深度学习或者 IOT 应用中,视觉处理都占据非常大的使用比例,而摄像头更是使用率最高的数据源设备,本文就带领大家为 Jetson Nano 2GB 安装摄像头,并且通过一些工具与简单代码,对摄像头进行测试。
Jetson Nano 2GB 开发者套件支持 CSI 摄像头、USB 摄像头和网络摄像头。
本文主要针对入门者,所以重点放在 CSI 摄像头与 USB 摄像头这两种比较合适的设备上,至于 GigE 这种复杂度较高的摄像头,先不做说明。
如何为 Jetson Nano 2GB
选择 CSI 或者 USB 摄像头
在选择摄像头之前,我们可以通过以下网址查看:
这里列出了 NVIDIA 官方推荐的摄像头型号。
一般来说 USB 接口摄像头都是免驱支持,不多做说明。
但是 CSI 接口的摄像头根据传感器芯片的不同区别很大,不是任何一款 CSI 摄像头都支持 Jetson Nano 产品,所以购买时一定要注意这个问题。目前在 Jetson Nano 上,开发者们常用的 CSI 摄像头是树莓派 V2 摄像头(传感器芯片是 IMX219)。
文章中,我们使用的就是以下这款:
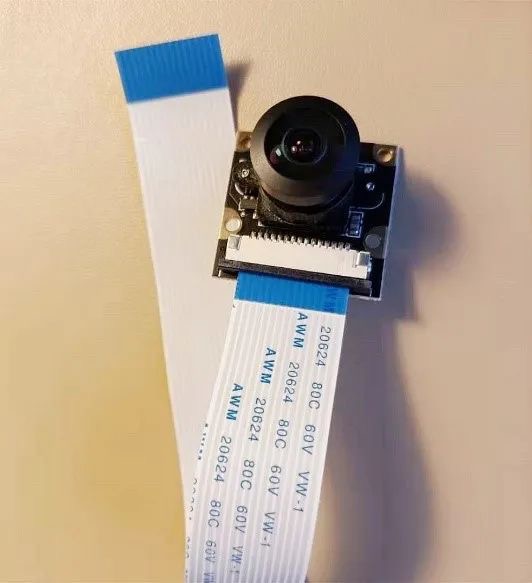
【注意】CSI 摄像头不支持即插即用,所以必须在开机前先装上去,系统才能识别 CSI 摄像头,如果开机之后再安装,会导致 Jetson Nano 2GB 识别不出摄像头,且有其他风险,因此请避免在开机状态下安装摄像头。
安装 CSI 摄像头
Jetson Nano 2GB 有一个 CSI 摄像头接口,位置与外观如下图。
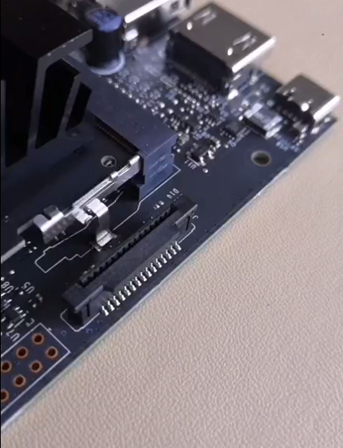
安装摄像头排线之前,我们首先要拔起上面的插销,请一定要特别小心,千万别弄断这个小塑料片,是会影响质保的。

有金手指(金属针头)的部分,必须面向 CSI 接口与摄像头接口有排针的一面,并且谨慎地让排线插到底,否则会有接触不良的问题。最后轻轻扣上插销,安装完成!
检测摄像头
安装好摄像头后,我们需要检测一下是否安装正确。
我们为了演示,安装了 1 个 CSI 摄像头以及 2 个 USB 摄像头:

最简单的检测指令如下:

如果摄像头没有问题,且安装正确,这个指令会显示目前安装的摄像头数量。如下截屏:

你会看到列出了单个设备,但是这样的信息量太少,通常无法判断到底哪个编号是哪个摄像头。
要更进一步检测摄像头数量与详细规格,就需要 v4l2-utils 这个工具协助,安装方法很简单,如下指令:

安装完之后,可以用以下指令检测比较完整的信息:

本例中执行这个命令后,会看到下面截屏信息,将三个摄像头都列清楚:

这里就能非常清楚看到第一个(/dev/video0)属于 imx219 规格(CSI)摄像头,第二个(dev/video2)是 USB2.0 的摄像头,接到 xusb-2(规格是 USB3)接口,第三个(/dev/video1)是 USB 摄像头,接到 xusb-3.2 (规格是 USB2)接口,这样就能一目了然知道哪个编号对应哪个摄像头。
接下来还可以用这个指令,进一步检测每个摄像头的更细致规格,包括所支持的图像种类、宽高、帧数等等,这些在后面使用代码时很重要。
请执行以下指令,来看一下第一个 CSI 摄像头的规格参数:

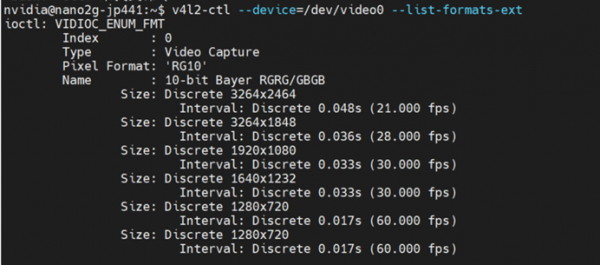
这里更精确地列出了这个摄像头的细节参数,例如显示的“RG10”就算代表这个摄像头的数据格式,下面的“10-bit Bayer RGRG/GBGB”则是进一步说明这个格式使用的算法与通道对应的参数。
再下面的尺寸,例如 3264x2464,其下还有对应的 Interval 性能参数,表示所支持的分辨率,以及该分辨率的最高执行帧率,这样的信息量才能够帮助我们在后面开发应用时作为设定的依据。
其他的设备,请自行修改。
下一篇文章里,我们将教大家如何调用摄像头,敬请关注吧!
来源:英伟达
好文章,需要你的鼓励


数据中心最新动态:2026年7月
全球数据中心建设需求持续高涨。北美方面,美国数据中心建设支出年化达510亿美元,微软在威斯康星州开放33亿美元设施,亚马逊和谷歌宣布在密苏里州合计投资250亿美元。欧洲方面,SoftBank将在法国建设5GW AI数据中心,投资额达750亿欧元。亚太地区,AirTrunk计划在印度投资210亿美元建设3GW数据中心。中东与非洲地区也有多项大规模项目落地。

当AI做“陪练老师“:弗吉尼亚理工大学等机构用大模型的“解题日记“预测考题难度
这项研究提出Epi2Diff方法,通过将大型推理模型的解题思考过程拆解为认知片段序列,提取过程特征预测考题对人类的难度,在四个真实考试数据集上超越了所有对比基线。

企业如何在边缘端与云端之间合理分配AI算力
随着企业将AI融入机器人、工业设备等物理基础设施,边云协同架构正成为关键课题。以Luminous Robotics和先正达为例:前者在太阳能农场部署的机器人每秒做出10次决策,数据定期上传云端持续优化模型;后者通过Cropwise平台整合卫星、无人机、拖拉机传感器数据,辅助农民完成约150项农业决策。两家公司均强调,边缘端负责实时响应,云端负责模型训练与更新,同时保持人工监督以确保安全与准确性。

南京大学联手阿里巴巴:让AI图像生成变得更“聪明“,一个让图像生成模型真正理解画面的新框架
南京大学与阿里巴巴提出MIMFlow,将掩码图像建模与标准化流端到端融合,让生成模型专注语义建模,以更少参数和更少令牌在ImageNet上取得FID 2.50的优异表现。
2021
03/17
16:52
分享
点赞

NVIDIA Blackwell 现已在云端全面可用
为“代理式AI”装上“护栏” NVIDIA打造“三重防线”
黄仁勋现身北京致辞:60年后,计算机正被重新定义
CES 2025 | NVIDIA Isaac GR00T Blueprint 让人形机器人“加速进化”
未来,就在我们手中
CES 2025 | 代理式AI崛起:NVIDIA定义下一代“代理式 AI Blueprint”
深度学习最佳 GPU,知多少?
NVIDIA推出用于多语言生成式人工智能的NeMo Retriever微服务
NVIDIA 初创加速计划 | 2024 NVIDIA 创业企业展示完美收官!
老黄掏出“迷你版AI超算”,每秒67万亿次运算,仅售2070元人民币
