
更灵活,更可靠,更安全的云基石——烽火下一代云基础设施平台
2020年,注定是不平凡的一年,云计算开源领域迎来一个重要的里程碑-OpenStack开源社区成立十周年。回顾过去的十年,云计算技术及市场迅猛发展,从实验室中的第一台云主机,到各行各业都在进行云化迁移,云计算已经作为推动人类社会发展的重要力量之一。而今年,在全球抗疫的大背景下,云计算更是作为抗疫力量的基石,为打赢这场全人类共同面对的战争,起到了不可或缺的作用。
在这具有特殊意义的一年,OpenStack社区也迎来它的年度重要活动OpenInfra Days China 2020。作为中国开源领域的技术盛会之一,本次大会聚焦“智能开源基础设施”,围绕对硬件加速器集成与多架构的支持,各类开源组件间的集成(如OSF各项目与容器基础设施的集成),硬件自动化与大规模扩展,将“云”扩展到边缘计算节点以实现5G和物联网(IoT),以及计算网络与存储等应用场景就基础设施的技术演进展开讨论和展望。
本次大会上,烽火通信云计算研发中心云产品总架构师王昊从自身产品研发和行业积累经验出发,以面向未来发展的视角,在大会上分享了主题为“更灵活,更可靠,更安全:面向边缘与中心融合架构的云基础设施平台设计与实现”的技术演讲,向与会者介绍了烽火云对于下一代融合架构的云基础设施平台发展的思考。
1、为什么需要融合架构?
随着烽火云在不同行业领域的应用和发展,面对不同的云计算行业技术标准和客户需求,在快速满足客户的同时,也面临一些长期以来客户存在的痛点问题,由于中心云和边缘云发展先后程度不一,导致客户在不同数据中心内存在多种云产品架构不统一,产品化程度不一致,存在不同短板的问题。随着云计算产业突飞猛进的发展,这些问题逐渐制约了云基础设施向未来进一步迈进。烽火秉持为客户打造“好用云,用好云”的发展愿景,一直在不断思考如何能彻底突破和解决这些问题,使云产品向下一代更灵活,更可靠,更安全的演进。
2、融合架构想怎么做:更安全,更可靠,更灵活
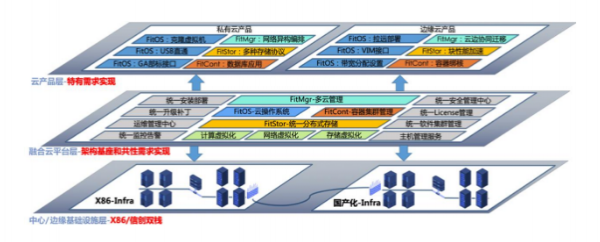
融合架构的核心思想就是一个以安全,可靠,灵活为特征的基础云平台,通过这个“基座”灵活的支撑上方的私有云和边缘云场景下的云基础设施平台。
其核心特色为:

为了实现这一基座目标,需要在整个云产品架构层面上进行重构优化,对全产品族进行类微服务化设计,充分吸收边缘云的平台架构优势,抽取共性组件,灵活组合应对中心云/边缘云的不同场景。
3、融合架构要做什么:关键技术实现
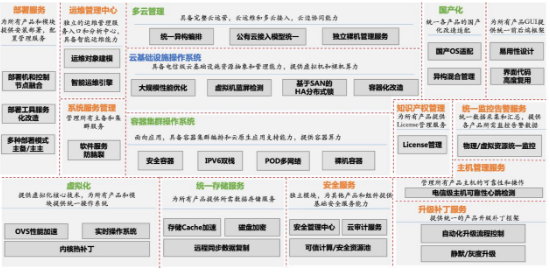
为了实现融合架构这一目标,需要在以下几点关键技术进行实现:
灵活部署:
通过灵活的部署服务,将支持面向边缘云场景的轻型组合和面向中心云场景的重型组合。
安全合规:
安全合规是整个云基础设施的核心技术领域之一,随着等保2.0规范的发布和实施,云上安全越来越成为行业关注的焦点。在融合架构中,整个云平台的安全能力在平台设计和开发中就进行分层构建,形成“分层安全,统一管理”的安全设计思路。
系统可靠性:
可靠性是影响融合云平台生死存亡的核心能力,无论是云资源高可靠保护还是云平台自身高可靠加固,都将作为整个基座的关键能力之一。
智能运维:
随着AI技术的快速发展,其对云基础设施平台也带来了深刻的技术变革影响,智能运维技术方兴未艾,融合云平台也在积极探索和考虑这一关键技术,将为全产品族提供统一的监控告警,数据采集,数据分析,故障预测,根因分析等一系列革新的运维能力。
光阴如梭,转眼已是十年,初心不变,未来可期。基于融合架构的云基础设施平台将成为下一代烽火云的前进引擎,以更灵活,更可靠,更安全为目标持续让客户享受到云计算技术带来的价值和变革,助力企业和社会不断前进,为我国云计算发展贡献烽火的一份力量!
好文章,需要你的鼓励


Albertsons借助Databricks构建零售商品智能决策平台
美国连锁超市巨头Albertsons正在基于Databricks构建商品智能平台,整合产品、定价、促销与陈列等决策功能,目标是在2026年底前全面向门店运营商落地。该平台以Databricks Lakehouse存储零售数据,通过Unity Catalog与AI Gateway实现数据治理,并借助AI智能体Genie支持自然语言查询,帮助商家洞察销售趋势,提升决策效率。此举是Albertsons今年四项AI核心战略投资之一。

阿里巴巴让AI图像生成模型“自我进化“:Qwen-Image-2.0-RL是如何让机器学会审美的?
阿里Qwen团队通过引入强化学习和在线策略蒸馏,将Qwen-Image-2.0升级为Qwen-Image-2.0-RL,让图像生成模型真正学会人类审美,文生图Elo评分提升78分,图像编辑提升93分。

微软正式将 Windows 11 打造为 AI 操作系统
微软正将Windows 11打造成真正的AI操作系统。在Build大会上,微软展示了AI模型与智能代理如何深度融合进Windows 11,让用户通过自然语言完成系统操作。借助Windows ML框架,超过5亿台PC已可在本地离线运行AI任务,无需联网、无token费用、数据不离设备。Office、Photos、Teams等应用已支持本地AI能力,Adobe、WhatsApp、Canva等第三方也在积极跟进,企业级AI PC采购需求有望加速。

港科大联手快手,让AI画图“减减肥“:一个让图像生成更真实的小技巧
港科大与快手联合提出NormGuard,针对流匹配模型强化学习训练中速度范数膨胀问题,通过训练时单向惩罚约束,在保留奖励的同时改善图像真实感。
2020
11/16
17:06
分享
点赞

Albertsons借助Databricks构建零售商品智能决策平台
微软正式将 Windows 11 打造为 AI 操作系统
工作中使用未授权AI工具之前,请三思
全球首座AI博物馆Dataland:用数据创造多感官视觉盛宴
ANS框架:Linux基金会为AI智能体建立DNS式信任机制
Hirebotics推出无代码防爆协作机器人,专为工业喷涂设计
美国消费品安全委员会拟出台电动自行车电池安全新规
江波龙:建设完成mSSD月产能百万交付能力!mSSD高速存储介质赋能端侧AI规模应用
从IO500双榜第一,看国产存储的系统级突破
Rocket Lab宣布以80亿美元收购卫星运营商铱星公司
OpenAI携手Trail of Bits发起"Patch the Planet"开源安全修复计划
公共电力性价比优势面临多年来最严峻考验
